Paso 1: Conseguir el chasis derecho


Lista de piezas
Conseguir el chasis derecho
Para elegir el chasis es una pregunta sobre el mecanismo de transmisión existen muchos accionar mecanismo.
Permite hablar sobre el mecanismo más popular dos.
Unidad diferencial ¿Qué es unidad diferencial?
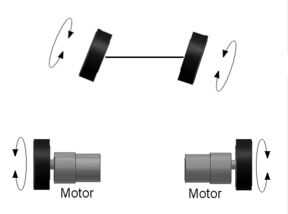
El diferencial del término significa la diferencia entre las dos entidades, en el contexto de la robótica es solo la diferencia de velocidad entre dos motores. Partiendo de esta diferencia de velocidad, un robot puede moverse en cualquier dirección en un diseño 2D.
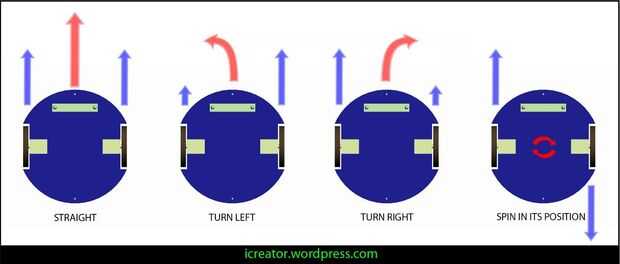
Cuando dos motores están conectados a las ruedas en línea, frente a la unos a otros (apenas como un par de ruedas conectadas a un solo eje) la velocidad con que gira cada motor determina la dirección del movimiento. Cuando ambos las ruedas giran a la misma velocidad la diferencia entre los motores es cero. Esto hace que el robot avance en línea recta. El robot puede moverse en dirección contraria si se invierte la dirección de la rotación de los motores de ambos. Otra vez se trata de una línea recta si la diferencia de velocidad es cero. Ahora cambiar la velocidad de cualquier motor resultará en movimiento en una dirección lejos de la línea recta. Por ejemplo, reduciendo la velocidad del motor derecho resultará en una diferencia de velocidad y por lo tanto, cambiar de dirección. La fuerza resultante es tal que el robot gira a la derecho. Este cambio de dirección puede controlarse al ángulo requerido reduciendo más la velocidad del motor. Más lento es el motor adecuado, más nítida es la vuelta a la derecha. Esto es exactamente lo mismo para la vuelta a la izquierda. Como conclusión, motor derecha más lento, más agudo a la derecha. Más lento izquierda motor más agudo de la izquierda. A continuación se presentan algunos escenarios que explica el funcionamiento del mecanismo diferencial. M1 y M2 son los motores que impulsan las ruedas izquierda y derecha respectivamente.
Tipo coche de buey
¿Qué es unidad de tipo de buey?
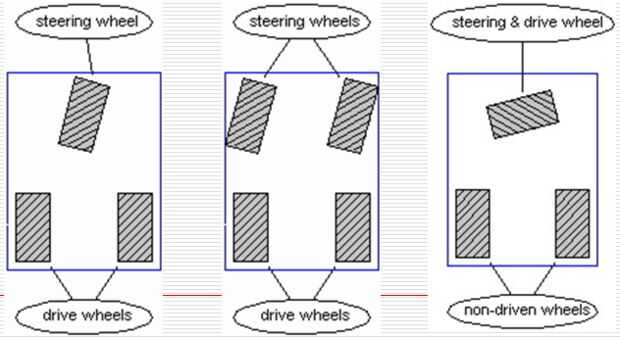
La unidad de tipo de coche es la más común en el mundo real pero no en mundo robot. Se caracteriza por un par de ruedas motrices y un par separado de volantes la traslación y la rotación son independientes unos de otros. Pero la traslación y la rotación están interrelacionadas por lo tanto que este sistema enfrenta camino grave problema de planificación
Cuatro ruedas son más eficientes en comparación con dos o tres ruedas. Los dos primeros de las cuatro ruedas pueden utilizarse para dirigir y las dos siguientes para manejar el robot. Equilibrio de un robot con ruedas cuatro nunca es un problema. Mayoría de los coches todos los días que utilizamos es cuatro ruedas y el ejemplo es suficiente para probar su existencia y sus capacidades.
Desventajas del tipo de coche conduce : el mecanismo de giro debe ser controlado con precisión. Una inexactitud leve puede causar errores de odometría grandes el sistema es no-holonómico por lo tanto planificación de ruta de acceso es extremadamente difícil como inexacta no hay ninguna directos actuadores direccionales
Así que es mejor utilizar diferencial unidad debido a su simplicidad y fácil de usar.









")
")


