Paso 7: Probar el motor de rotación continua
Antes de colocar el servo nuevo junto que necesitamos poner a prueba el motor y servo para asegurar que podemos controlar.
Usé un clon de arduino para probar el servo.
Lo ideal sería enviar una servo.write(90) debe tener el motor todavía. En mi caso esto no sucedió.
Por esta razón puede ser útil soldar en una olla de k 5 en su lugar, enviar un comando a 90 grados y girar la olla hasta que el motor no gire más. Luego pegar la posición del bote con pegamento caliente.
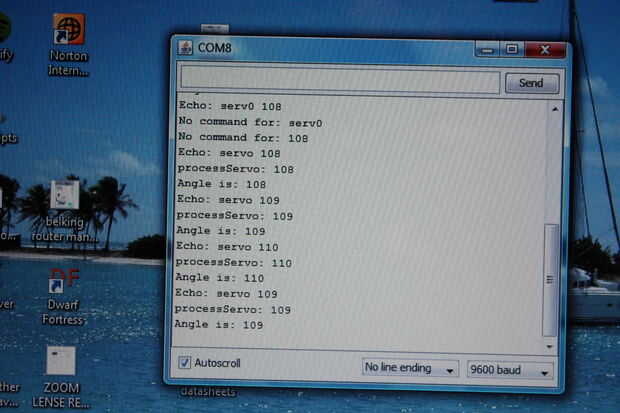
Desde que tuve las resistencias necesitaba determinar dónde estaba el punto centro de mi servo. Escribí un bosquejo simple arduino Lee un ángulo de entrada en el monitor serial y escribir este ángulo al servo. Haciendo esto que he encontrado los dos servos convierten el centro punto ángulo fue de 104 y 106 grados respectivamente. Envío de un ángulo mayor que esto hará que el servo gire en una dirección y un ángulo menor que causaría el servo girar la otra dirección.
Por desgracia yo he desechado el script... así que no puedo publicarlo. Nunca la mente, estoy seguro de que eres capaz de escribir una secuencia de comandos usted mismo.
Control de velocidad es el tamaño de la diferencia entre el punto y el ángulo que has escrito.
Así, para mi servo con 106 grados como el punto convertiría a 126 grados menos de 136 grados pero ambos estarían en la misma dirección.
86 grados convertiría el servo a la misma velocidad que 120 grados, pero en la dirección opuesta.




")

")





")
")