Paso 1: Resumen de componentes de Hardware



Es muy probable que vas a tener todo el hardware que tengo aquí. Por esta razón usted puede modificar su proyecto como desee. Tratar este tutorial aquí como ejemplo de lo que puede hacerse con Edison de Intel.
Si usted quiere construir un robot como Cookie Monster tienes que iniciar desde el hardware primero. A continuación, una vez que todos los elementos de trabajo, usted puede construir el marco de caso, etc..
Así que vamos a ver cómo los diferentes componentes se conectan entre sí.
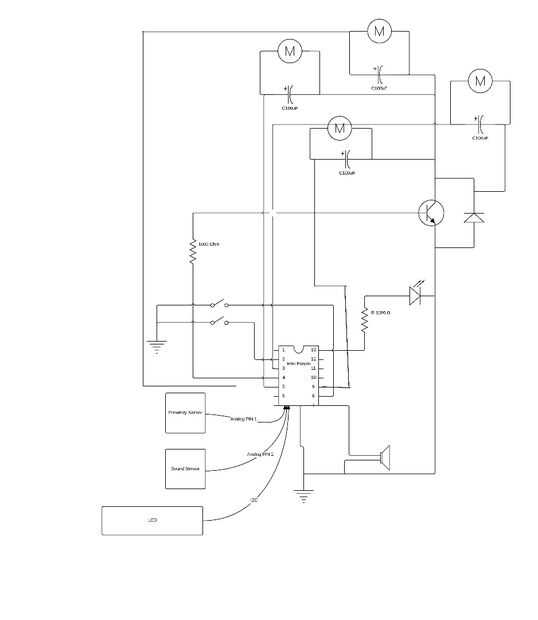
Usé el escudo de arboleda para conectar la mayoría de los componentes. Facilita las cosas. Pero si no tienes el escudo puede utilizar cables común. El diagrama que se adjunta a este paso le enseña a conectar todo.
Te recomiendo usar pistola de pegamento caliente para aislar los cables y asegúrese de que no se desconecte después.
Por qué utilizo un transistor en el circuito. El transistor es un hack para eliminar el llamado efecto de zumbido. Un efecto de zumbido es causado por un voltaje inestable en un circuito. La inestabilidad es causada por cuatro servomotores funcionando al mismo tiempo. Ellos necesitan una gran cantidad de corriente. Cuando una corriente se utiliza para mover los servos, ligeramente caídas de voltaje en el circuito entero. Esta caída provoca los impulsos PWM que controlan los servos así caer (o cambiaron con respecto a la tierra). Un cambio en PWM hace motores mover otra vez un poco porque piensan que fue un cambio intencional. Genera otro cambio de voltaje y así sucesivamente. En resultado los servos no son capaces de encontrar una posición estable. Se llama un efecto de zumbido porque un servo zumbido apenas tratando de fijarse en un ángulo deseado. Se ha añadido un transistor Darlington TIP120 al circuito. Que se estabiliza una tensión y puede manejar una gran cantidad de corriente. Lo más importante funciona como tecla de transistor. Puedo controlar el voltaje en los servos aplicando un voltaje en la base del transistor. Cuando los servos no se suponen para moverse, se corta una tensión. Esto es cuando el PIN 4 tiene un estado bajo. Cuando los servos están a punto de moverse, que pin 4 está establecido en alto lo que cierra el circuito para los servos, giran y entonces la tensión se corta otra vez. Es un hack. También he añadido 4 100uF condensadores directamente en la línea de servo. También están ayudando a reducir el efecto de zumbido.













