Paso 6: Cableado y programación y ajuste
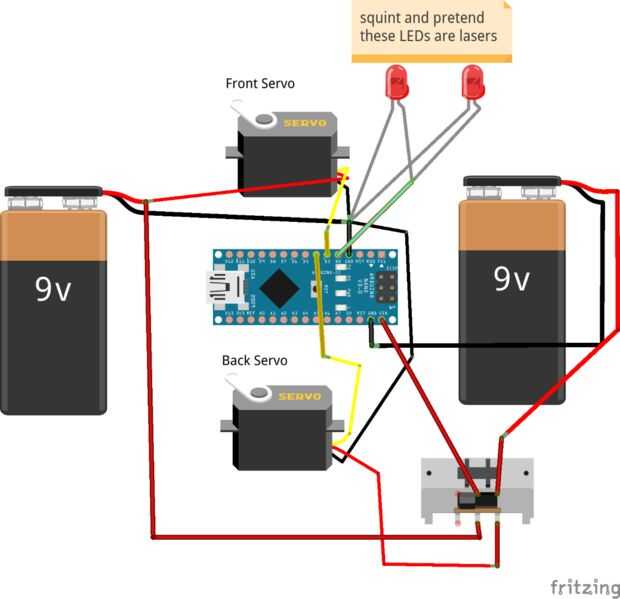
El cableado es muy simple. Conectar una fuente de alimentación a los dos servos, conectar los cables de señal del servo con Arduino, conecte el láser a la Arduino y finalmente conectar otra fuente de energía para el Arduino. Dejar oportunidades para agregar componentes adicionales tales como sensores.
La programación también es muy sencilla, simplemente camina hacia adelante. Está escrito para averiguar los ángulos de alambre y la coordinación de las piernas. Una vez caminando se ha perfeccionado, se añadirán sensores y la programación va a cambiar.
Para este Instructable, esta parte del proyecto he mantuvo simple, estúpido en propósito. Hay una gran variedad de métodos de poca en el archivo adjunto. Decidir el método a usar (o definir el método perfecto para utilizar) realmente se basa en los atributos del bot. Los ángulos de las piernas se basan en el peso de lo bot, su altura, la posición de los servos y su poder. A veces pequeños movimientos parecen funcionar mejor que grandes movimientos. A veces es lo contrario. Se necesita mucho de la experimentación.













