Paso 9: Todo sistema de
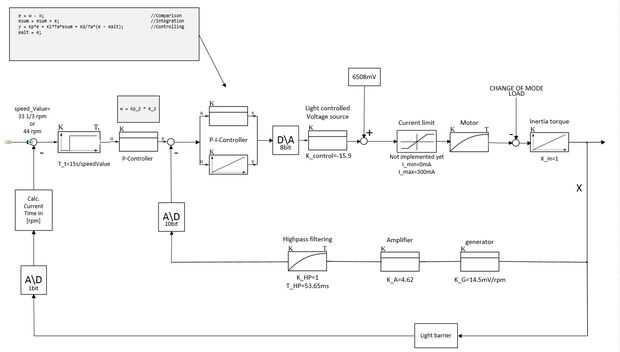

Todo sistema se ve como se muestra arriba y todavía es muy experimental. El sistema actual funciona bastante bien. Se mide la velocidad de rotación y el controlador p da un nuevo valor para el pid controla dos el segundo sistema de control. La velocidad de rotación es generalmente exactamente alrededor de 33 1/3 rpm, que era el objetivo principal de este proyecto, pero aún está en un proceso de desarrollo.
este video muestra el plato motriz y la fuente de tensión, con un parpadeo led que indica el control.
Voy a añadir pasos a este y otros instructables para completarla.
Habrá un circuito más complejo y un tablero del PWB diseñado. Se implemento un mecanismo de automatización al corto circuito del generador, si la velocidad de la placa giratoria es a alto. Esto llevará a un amortiguamiento debido a la autoinducción, que actuará como una rotura. Esto es una buena posibilidad para reducir el sobrepaso.
Otro punto importante, es que quiero implementar un microcontrolador independiente, sin ningún material de arduino. Eso es por qué se implemento un Atmega328 con mi software escrito en las próximas semanas.
Si tu tiene comentarios o están interesados en más informaciones/el software/etc., no dude en ponerse en contacto conmigo.













