Paso 5: Software básico primeros ensayos del aka
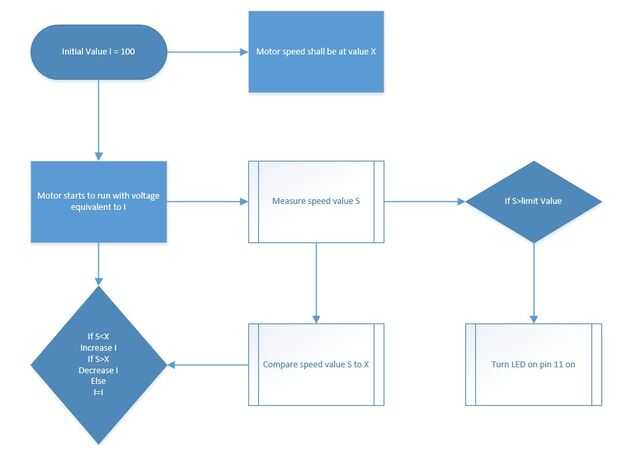
Puesto que ahora tenemos un sensor para medir una tensión con un comportamiento lineal el rotationspeed y un motor, ambos conectados a una MCU (unidad de microcontrolador), podemos implementar un lazo de control simple en lenguaje C.
Al principio, los valores medidos se filtran con un punto diez hacia filtro promedio (además los filtros analógicos).
El indicador LED de muy alta velocidad viene dada por:
Si (sensorValue < = 20) {digitalWrite (led, alto);} //turn LED encendido, si la velocidad es demasiado alta
Else {digitalWrite (led, LOW);}
El código de control del motor está dado por:
controlador para la linealidad del motor
Si (sensorValue > speedValue) {fadeValue = fadeValue-1;}
fadeValue es el valor, desapareciendo el LED y por lo tanto variando el voltaje de control del motor
else if (sensorValue < speedValue) {fadeValue = fadeValue + 1;}
Si (fadeValue < = 20) {fadeValue = 20;}
else if (fadeValue > 255) {fadeValue = 255;}}
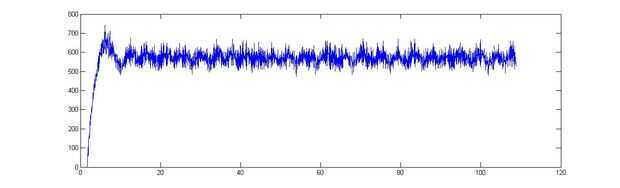
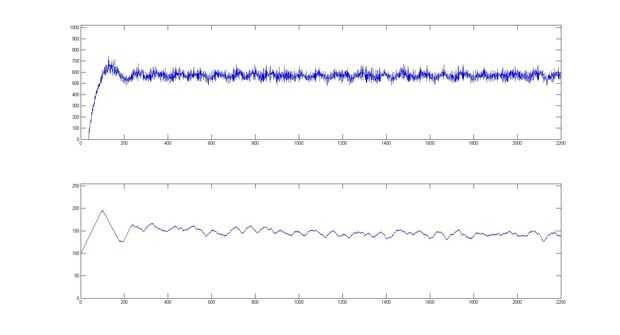
Este es un extraño tipo de controlador p (con ninguna proporcionalidad con el valor de coincidencia), que trabaja, pero no muy bien. Una desventaja principal es, que no es muy rápido y empieza a swing, como los espectáculos de trama de datos. Otro punto es, que no sé el speed_value medida exacta, que para llegar a, acabar con exacta 33 1/3 rpm. Había aproximado de los valores en este paso, que no son correctos. Qué otra cosa puede ver, es que el filtro no elimina el ruido. Eso es porqué tengo rediseñar los filtros también.
La tercera imagen muestra la velocidad del generador y la tensión de control en la parte inferior.
Este problemas tienen que solucionarse de ahora en adelante en los siguientes pasos:
- nuevo cálculo de los filtros
- medir los datos relevantes de los sistemas
- Utilice como base para el cálculo de un controlador PID
Agregar sensores adicionales, que miden la velocidad de rotación midiendo el tiempo entre los puntos marcados en la placa giratoria
A mi favor, implementé una MCU, con la que puedo manejar el control de todo y sus cambios en forma digital.













