Paso 6: Nuevo esquema y Blockdiagram pt. Me
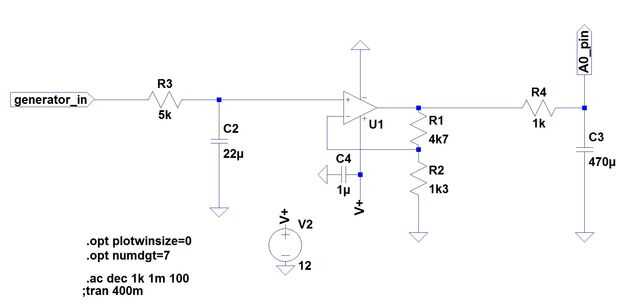
La primera imagen muestra los nuevos filtros. Había reducido a 2 filtros, ambos con frecuencias de corte inferior a 1Hz. Este dar tiempo constantes a nuestro sistema de loop, pero recuerda que todo esto es sólo una rotación lenta y un sistema de movimiento no rápido.
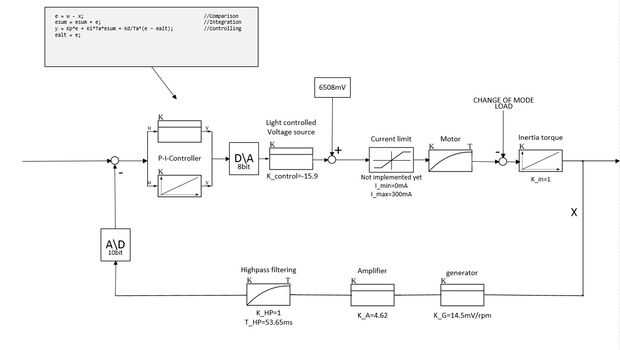
Ahora tenemos, cuidamos sobre el control PID. En el cuadro primero, todo el sistema como un diagrama de bloques, que se muestra.
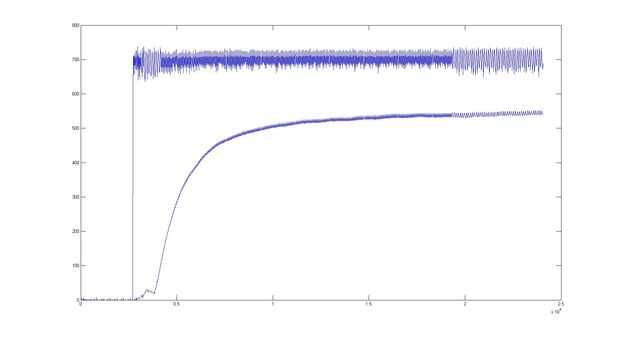
El lazo tiene que ser abierto, y la respuesta de paso debe ser registrada (en mi caso, con un arduino). El paso fue creado por una señal PWM de arduino. La respuesta muestra un comportamiento PT2 (casi PT1). Cálculo de las constantes de tiempo y ganancias (métodos típicos con la tangente a la mayor pendiente) conducen a K = 0.78 Tu = 1114ms y Tg = 1870ms. Para obtener más información al respecto, visita este, que por desgracia está en alemán.
Utilizando cálculos estándar después de Hrones/Chien/Reswick, terminamos con los valores de control Kp = 0.755, Ki = 0,336 y Kd = 0,421. TA ser el tiempo entre muestras. Como usar un micro controlador, este se pierde tiempo que tengo para incorporar en los cálculos.
Esto ahora puede ser implementado en el algoritmo estándar de un controlador PID:
e = w - x; comparación
ESUM = esum + e; Integración
y = Kp * e + Ki * Ta * esum + Kd / Ta * (e – ealt); control de la
ealt = e;













