Paso 7: Controlador PID
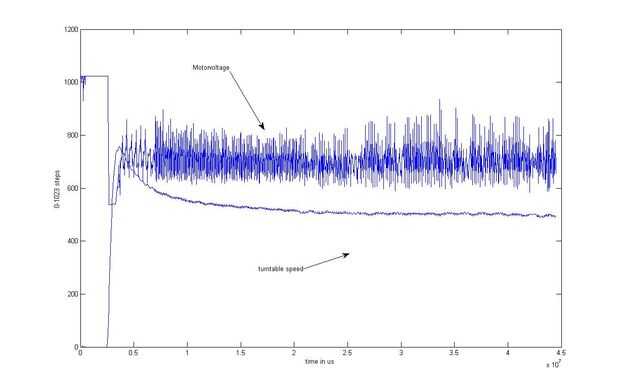
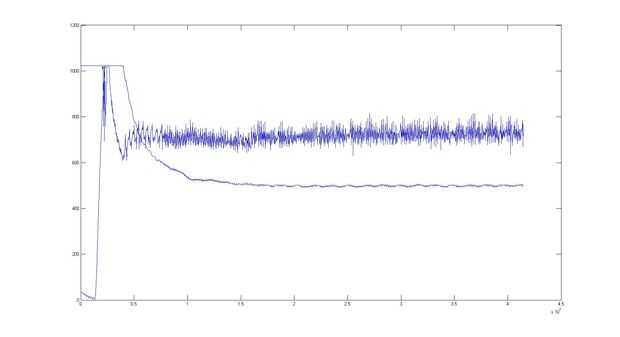
El primer controlador PID, que utiliza los valores calculados, mostró un comportamiento bueno pero no impresionante durante mis pruebas. Experimenté un poco y endet hasta con Ki = Kp = 2 y un pequeño Kd = 0.2 (primer cuadro). Esto conduce a un cambio más bajo de mi tensión del motor a cambios pequeños pero una gran reacción del controlador a grandes cambios (segunda foto). Estos cambios bruscos, que son responsables de controlar más rápido, tienen también una negativ: el motor entra en "plenos poderes" y el plato giratorio tiene un sobrepaso principal. Esto no es importante, si el giradiscos se utiliza correctamente, ya que sólo se debe ejecutar con la misma velocidad o encendido y de botones. Pero si la tengo con mi dedo, acelera. Esto puede evitarse al limitar la velocidad de máximo control motor a aproximadamente 80% por medio del software.
La parte D de mi controlador es también visible en el LED de mi fuente de voltaje controlada luz, porque hace un parpadeo.
He intentado mucho con variando las constantes, pero tanto el sistema es lento, o tiene un gran sobreimpulso. Las constantes, presentó en el último parece ser lo mejor para mi propósito, ya que es más importante para mí llegar tan rápido como sea posible, de llegar a más lentamente con no sobrepaso mi 33 1/3. La lenta reacción del controlador en la una mano es un problema de software, por otra parte es el resultado de mi hora de constantes debido a las altas capacitancias en el bucle de retroalimentación.
Si cambio mi mente, puedo simplemente lo en mi firmware.













