Paso 5: Agregar tridimensional monta (kinect + webcam y láser base)
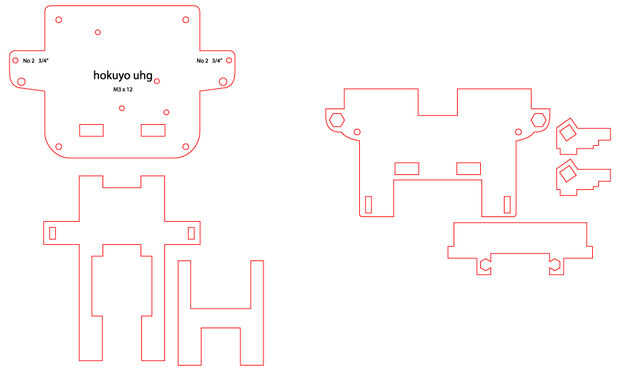

El láser no se ajusta dentro de la base, por lo que el panel superior de la base tuvo que ser dremeled para caber la forma de laser, como saca de la parte superior de la base. La montura para el láser también contiene un sensor infrarrojos Sharp que se coloca en el frente de la base. Apuntala el láser utilizando orificios ya existentes en la base y algunos planos horizontales y verticales que se enclavija. La parte superior del laser es de color naranja, pero añadiendo una capa de blanco Sugru encima coincide con el esquema de color liso y aspecto del robot VGo.
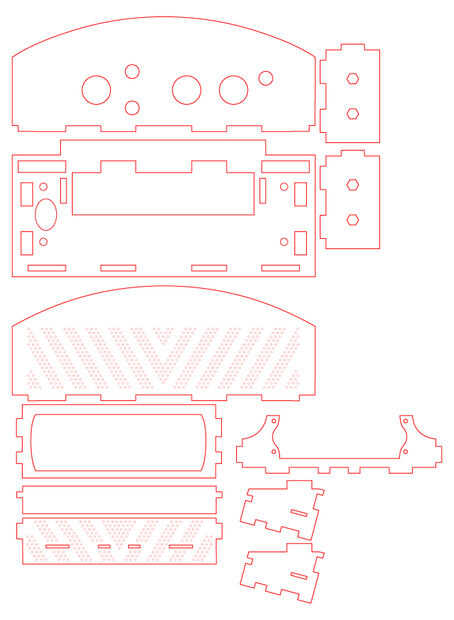
El kinect + webcam tuvo que caber en el factor de forma del ancho del robot, como no quiere comprometer la apariencia estética mediante la adición de algo que es más ancha que el robot. El Kinect se hizo menos amplia desprendiendo circuito más largo (el tablero se coloca a los planos mediados) y dremeling las piezas de la caja de metal que ha superado el tamaño de la otra tabla. La webcam es necesario mirar hacia la base del robot así que su montura es una caja angular que encaje en el soporte de webcam.







")





