Paso 3: Cargar el código de Arduino - ejecutar la prueba básica
Ahora una vez que el circuito es el momento de descargar el código adjunto y subirlo utilizando el IDE de Arduino más reciente.
Para configurar el IDE de Arduino para el registro un LinkIt, primero crear una cuenta en el sitio web de MediaTek Labs
Y luego siga el siguiente enlace para descargar el controlador más reciente y el software tablero de LinkOne
http://Labs.MediaTek.com/site/global/developer_too...
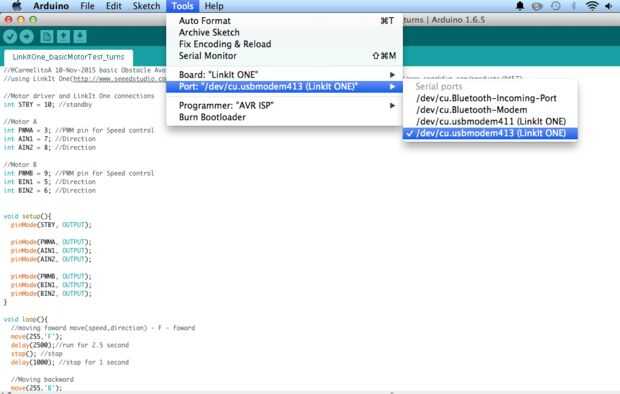
Uno tiene con éxito completar la configuración usted debe ver una opción para seleccionar el tablero como LinkIt como se muestra en la foto de arriba.
Subir el sketch de ejemplo blink que viene con el IDE de Arduino y ver si parpadea el LED en el un tablero LinkIt, significa que has completado la configuración de los IDE de Arduino correctamente.
Ahora abra el archivo que ha descargado y subirlo a la LinkIt uno seleccionando el puerto que está conectado a como se muestra en la foto de arriba.
En esto quizás tenga que cambiar la conexión A01 y A02 si su motor izquierdo se está moviendo en la dirección opuesta del motor derecho.
Conecte la batería y el lugar que el robot en una superficie plana y debería ver usted robot moverse como se muestra en el siguiente vídeo






")






