Paso 5: Cargar código Arduino - prueba el robot autónomo
Descargar el código adjuntado y subirlo a la LinkIt utilizando el IDE de Arduino
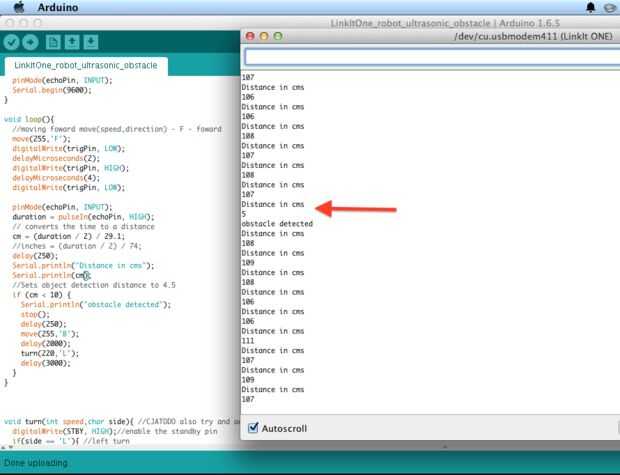
Con el lugar de robot en la plataforma que en mi caso es la espuma que vino con el paquete de LinkIt uno cambiar el puerto al puerto de depuración. La depuración es el otro puerto que aparece en las herramientas > puertos de sección y luego haga clic en el monitor serial a la derecha del IDE de Arduino.
Como parte del código hemos puesto umbral de detección de obstáculo a 10 cms, para probar que tu robot se detiene y se mueve izquierda coloque usted mano o un objeto en frente, y en el monitor serial debería ver el obstáculo detectado como se muestra en la foto de arriba.
En este punto usted puede aumentar o disminuir el umbral de detección de obstáculo de 10 cms en el código.
Ahora comente la línea Serial.begin en el código y subir tú código a LinkIt una y conectar la batería de Lipo, como se muestra en la foto de arriba.






")






