Paso 3: Crear el robot
Con la configuración anterior, conectar el Arduino al ordenador y luego ejecute este bosquejo. Luego, después de completa este bosquejo y las paradas de Servo en movimiento, atornille el cuerno con el tornillo provisto (esperemos) que (esperemos) viene con el servo. Asegúrese de no mover el Servo de la posición estaba en después de ejecutar el sketch.
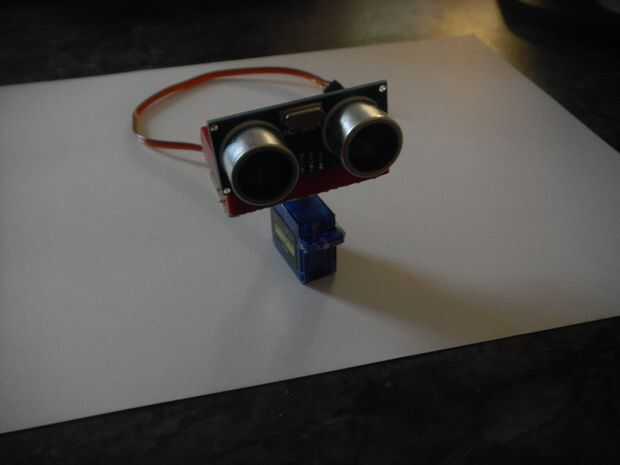
Después de preparar el servo, fije la placa mini a la parte superior de su cuerno del servo (yo usé alguna cinta de la espuma que yo tenía por ahí) y luego fijar el sensor a, como se muestra en la foto de arriba.












")
