

En este instructable, va mostrando cómo diseñé, programado y construido un dispositivo como este con un par extra prácticos características para hacerla más versátil que uno en su campo de paintball local. Pero primero, un poco de historia...
Yo estaba experimentando con motores del cohete hechos en casa (puramente para la hospitalidad de fin de semana), y un amigo y yo empezamos hablando de optimizar la mezcla de combustible. Rápidamente nos dimos cuenta que no podríamos nunca calculamos el rendimiento en las cercanías con precisión suficiente para poder obtener datos significativos acerca de los efectos de pequeños cambios en la proporción de combustible. La conversación se dirigió entonces a las técnicas de medición. No pasó mucho tiempo antes de que estaba pensando sensores, contadores y LEDs! La idea original era utilizar un contador por un oscilador 555 que comienza cuando el cohete pasa un sensor y se detiene cuando el cohete pasa el segundo sensor. Entonces simplemente mostrar el estado del contador en un montón de LEDs en binario...
OK, que podría funcionar, pero tendría que tomar una calculadora conmigo para cada lanzamiento. Luego está el comercio entre simplicidad y precisión. Un oscilador rápido sería más preciso, pero requiere al menos 2 o 3 contadores en cascada para contar los pulsos durante el corto tiempo que el cohete está entre los sensores. Un contador puede hacer el trabajo, pero sólo si el oscilador es lo suficientemente lento para que no desborde el contador... Inmediatamente abandoné esa idea.
Tuve unos Microcontroladores AVR ahí (un arduino, pero construyendo su propio sistema de destino es mejor en todos los niveles. Ahorraré ese argumento para otro día...) y me di cuenta que uno de ellos podría hacer el trabajo perfectamente. Y aún no tengo una calculadora! En ese momento comenzó a diseñar en serio este proyecto y nació este instructable.
Una descripción rápida de cómo funciona antes de continuar:
Dos fotosensores 12VDC (proyector/receptores con reflectores) detectan el cohete, o niño o pastel balístico, o lo que quieras al reloj y enviar una señal a los dos pines de interrupción externa en un ATMega328P a través de buffers de transistor (nos pondremos en interrupciones y esas cosas más adelante, promesa.) Los sensores que estoy usando son de Omron E3F2-DS10B4-P1. Fácilmente son el componente más caro, pero era capaz de pedir prestado un par de ellos para el desarrollo y prueba de este circuito. Cualquier dispositivo que puede detectar el objeto y enviar una señal hacia fuera funciona bien sin embargo. El circuito que muestro aquí funciona con 12VDC de estos sensores, pero con una pequeña modificación puede también trabajar en otras tensiones igualmente bien.
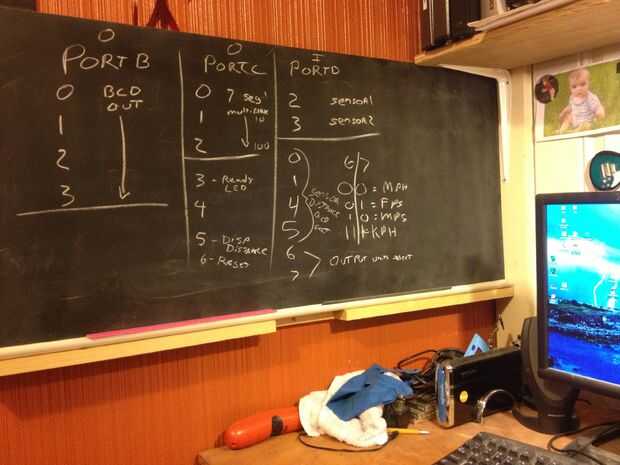
El ATMega mide el tiempo entre las interrupciones, lee la distancia definida por el usuario entre los sensores de algunos interruptores DIP, hace la matemáticas, lee el usuario define unidades de salida (MPH, km/h, etc...) de los interruptores DIP más y finalmente multiplexa la salida a tres displays de 7 segmentos a través de un único 74LS48 BCD al decodificador de 7 segmentos.
¿No suena demasiado mal derecho? Bueno, todos menos el pastel de todos modos...
Los sensores pueden ser en cualquier lugar de 1 a 16 pies separados, y la salida puede ser en millas/h, km/h, pies/seg o metros/seg. El ajuste de la distancia de los sensores permite al usuario cambiar la velocidad de mínimo y máximo medibles objetivo sin tener que reprogramar el chip. Esto resulta útil cuando, después de volar un cohete o dos, los niños quieren correr sus motos... Todavía hay problema de desbordamiento de contador de tiempo y la distancia variable es una forma algo alrededor de ella. Hay otra manera que utilicé también que os hablaré más adelante: escala de tiempo.
Este instructable es (esperemos) todo incluido. Cada paso en el proceso se discutirá en detalle desde el diseño del hardware, a la programación de AVR, para dibujar el diseño esquemático y la placa de circuito, y finalmente grabado la Junta de soldadura. Todo el software que uso es totalmente gratuito y muy funcional. Atmel studio 6 es para el desarrollo de AVR y ExpressPCB es para el diseño del esquema y tabla. Por lo tanto, todas las imágenes y los procedimientos se basará en estos programas. Hay otros igualmente libre y, podría decirse que, opciones más funcionales, así que elegir lo que es mejor para usted. En el lado del hardware, va a utilizar un dragón del AVR (~ $50) para la programación, una placa de prototipos y que un ordenador con un USB puerto obvio :)
Una completa lista de piezas, herramientas y materiales se publicarán en paso 11 ***
Por cierto, el AVRDragon requiere al menos un cable plano de 6 pines para hacer la programación. Necesitará un encabezado hembra de 2 x 3 en cada extremo (2.54 mm)
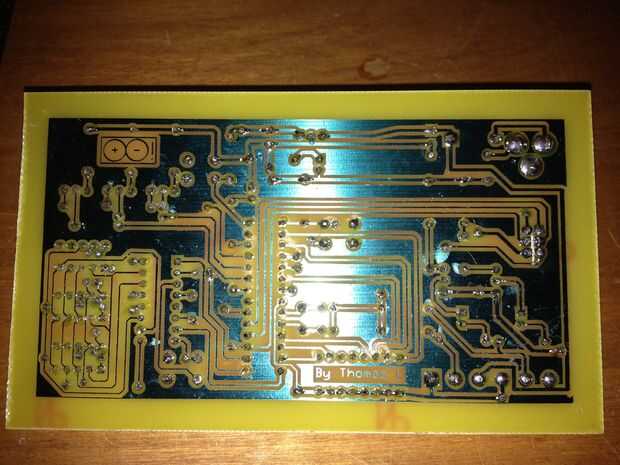
En cuanto a la Junta Directiva de la aguafuerte, usé un tablero previamente sensibilizadas coper cara doble revestido (1oz, 1 / 2oz sería aceptable,) algún desarrollador positivo para eliminar el photoresist expuesto y cloruro férrico para grabar el cobre. Nunca he usado el método de transferencia de tóner, así que no estoy seguro si los rastros pequeños saldria limpiar con esa técnica.
Más información sobre grabado más adelante. En primer lugar, permite sólo echar un vistazo el esquema...



 Cronógrafo utilizando un micrófono")









