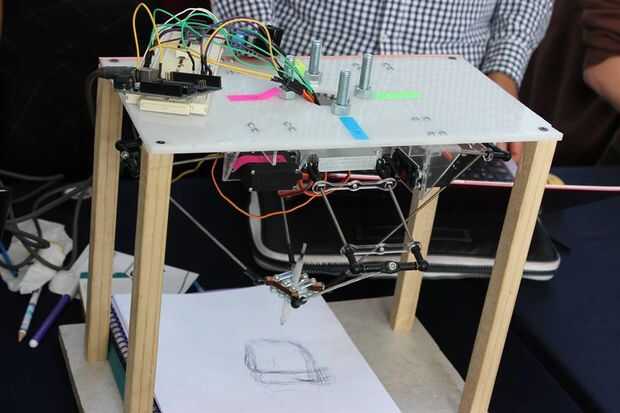
Bueno, se trata de un robot paralelo con cuatro brazos, son muchas las aplicaciones de la misma. Lo estoy usando para hacer dibujos.
La cinemática inversa se hizo en mathematica 10 y la interfaz de usuario fue hecha en labview con Arduino.
El robot es accionado por los motores servos pero esta característica es que un problema debido a la resolución de los grados de servos es limitado.
Así que los dibujos que puede hacer que el robot son similares a los de la simulación.


")










