
Este proyecto está basado en Arduino y es controlado por mi Max/MSP
Curiosibot es básicamente un Robot que puede tocar un instrumento percutive, en este caso las serpientes de cascabel y puede ser control por cualquier programa que se ejecuta MIDI a través de Max/MSP. Jugar al instrumento mediante el golpe de un solenoide en las serpientes de cascabel y crear la nota.
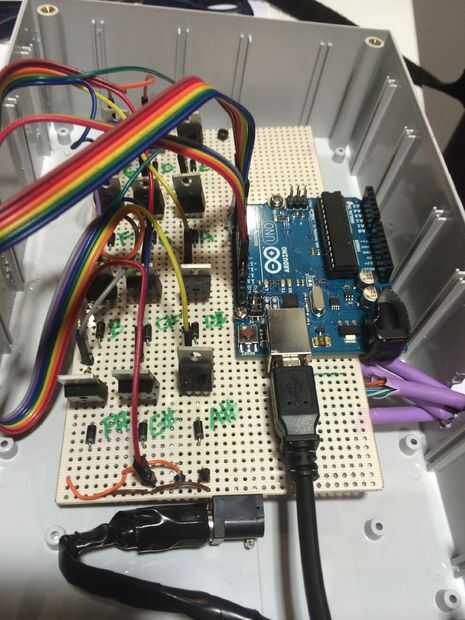
Los materiales para el proyecto son:
1 Arduino uno.
1 Cable USB
1 fuente de alimentación de 48V
Para cada nota que tocaba el robot necesitamos uno de estos:
1 resistencia de 1KΩ
1 transistor TIP120 o TIP102
1 diodo 1N4004
Jumpers y los cables necesarios.