Paso 3: Cableado parte B
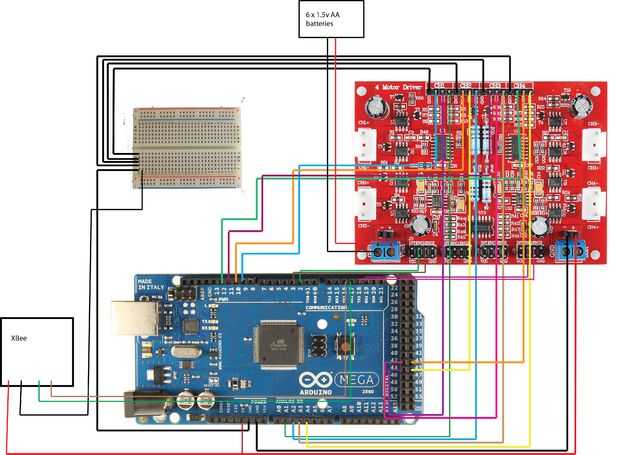
Alambre del conductor del motor de rover 5 Junta a la arduino mega 2560 debería ser más fácil si un poco desordenado. La imagen que he incluido muestra cómo lo hice. Aquí es código arduino de donde los cables van.
#define encoderA 2 #define encoderB 3 // Only use one interrupt in this example #define encoderC 19 #define encoderD 18 // Only use one interrupt in this example volatile int Lcount; volatile int Rcount; int Lcountsaved; int Rcountsaved;
int speedch1 = 9; // left front int speedch2 = 10; // left back int speedch3 = 11; // right front int speedch4 = 12; // right back // direction pins int dirch1 = 44; // left front int dirch2 = 45; // left back int dirch3 = 42; // right front int dirch4 = 43; // right back
int curch1 = A1; // left front int curch2 = A2; // left back int curch3 = A3; // right front int curch4 = A4; // right back
He incluyo los pasadores de la cur (corriente) pero nunca llegué a trabajar. He utilizar un protoboard de un terreno común, esto es probablemente incorrecto pero funciona. Voy a comentar Xbee en un paso separado













