Paso 5: Puntuación de visualización y detección de objetivo.
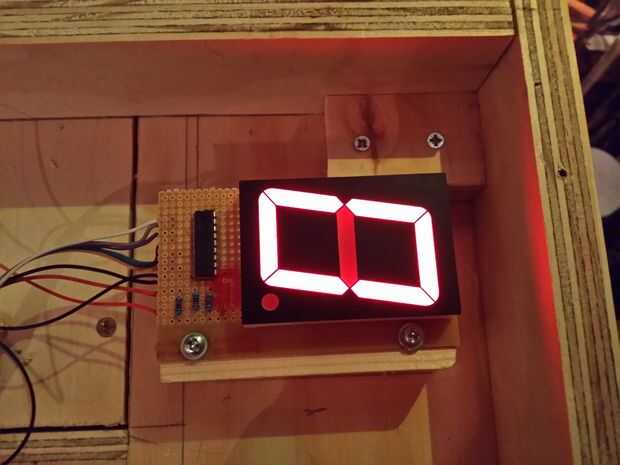

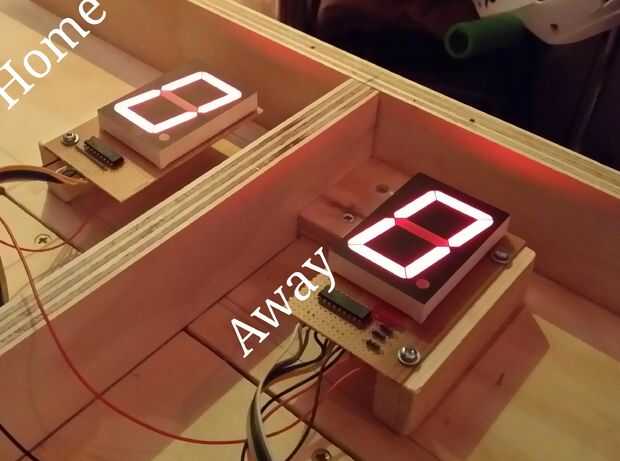









Montaje de ambos lados de la línea de centro de campo de juego de centro.
Fuente de alimentación, entrada de cables para cada pantalla se enruten a través del pequeño agujero en la parte inferior de la tabla base.
Arduino controlar las placas y fuentes etc. se colocará debajo de la mesa de alimentación manteniendo 240v AC en un gabinete aislado conectado a tierra o doble con mcb convenientemente clasificado o fusible para protección contra fallas.
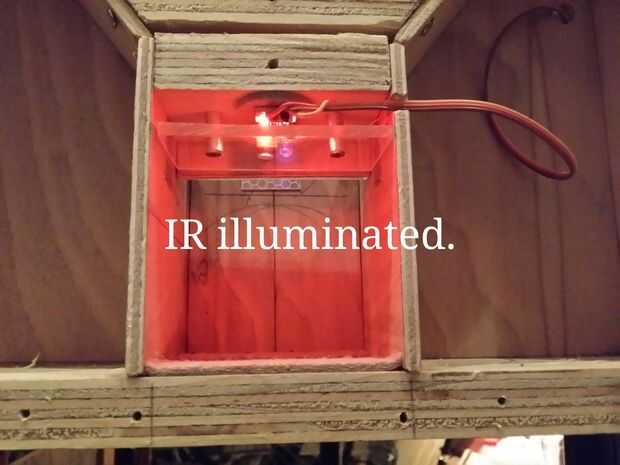
Detectores de meta IR Next-instalación y probar...
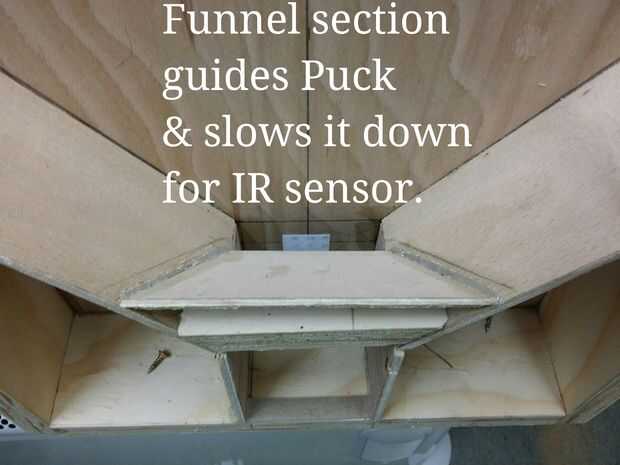
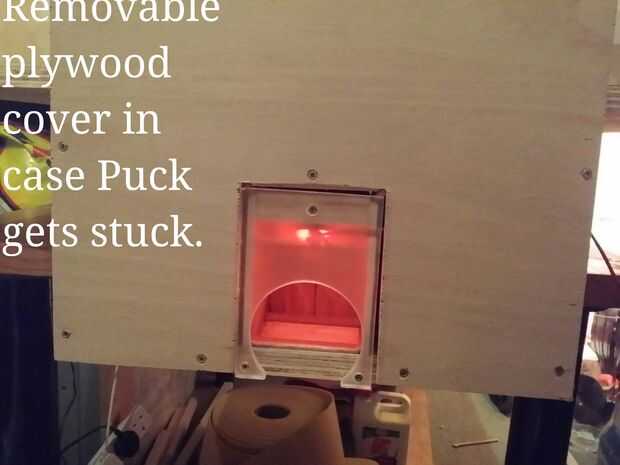
Usé 18mm de madera contrachapada para lados objetivo y capas de 6mm para las secciones de embudo y delantero y traseras cubiertas. No pegar la portada como necesitemos acceder a si disco u otro objeto encontrar camino hacia los objetivos. (ver fotos).
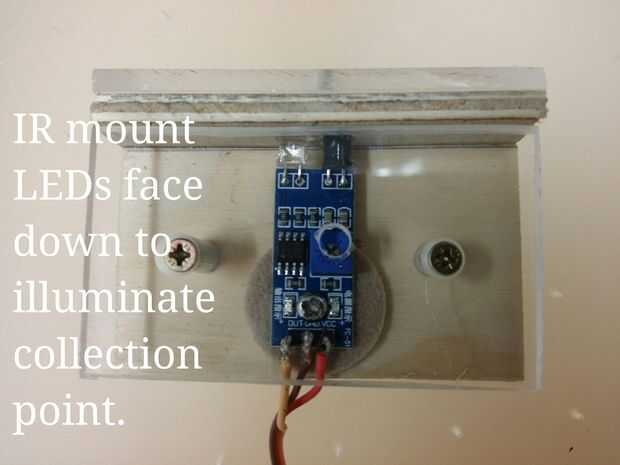
El módulo IR se utiliza para contar el objetivo como el pasa disco con. Hice dos goles ensayo antes de conseguir el diseño final confiable tecla puntos abajo:
1. Puck rebotando hacia fuera de la meta.
Solución - sección curva en la parte posterior del objetivo a Puck en la sección del embudo.
2. Puck ayunar para el Señor IR si afectados.
Solución - sección de embudo para duende malicioso antes de IR sensor módulo de detección.
3. Puck contando más de un gol al pasar el sensor de infrarrojos.
Solución - Arduino revisar código ignorar sensor de infrarrojos para 2-3 segundos después de meta contado.
4. Puck se atasca en embudo o colección.
Solución - hacer objetivo profundidad 10mm + disco diámetro y mismo para el área de la colección de Puck. El Puck debe borrar al senor IR por 10-20mm vertical para evitar falsas metas cuando Puck quita de punto de recogida.
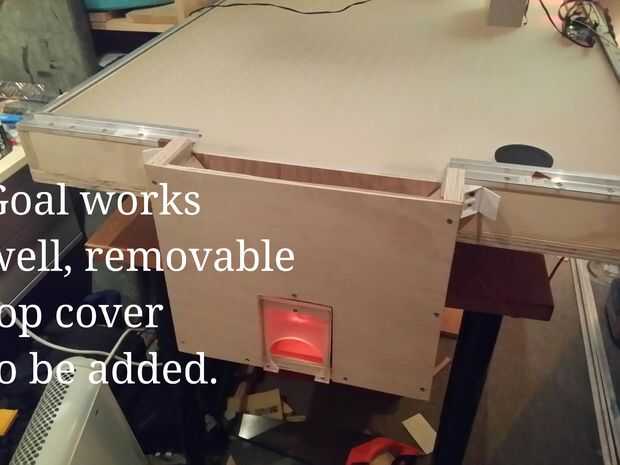
El diseño final ha sido probado con ventilador ventiladores funcionando y ahora es muy confiable y preciso cuando cuenta alto - objetivos de baja velocidad desde todas las direcciones.









")



")