Paso 3: MSP430 esclavo con motores
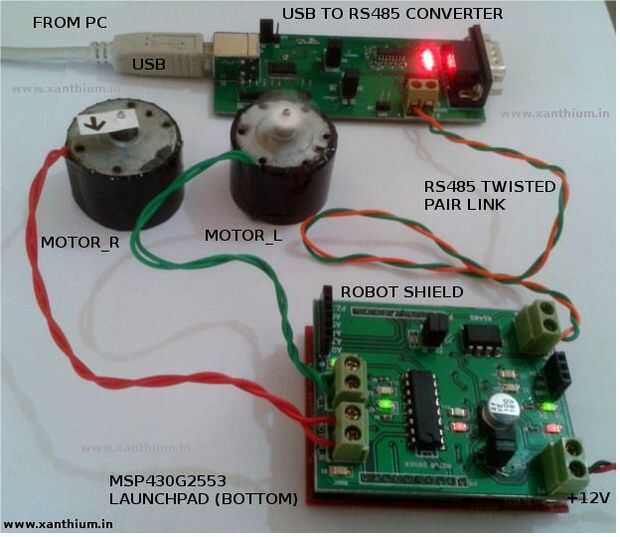
Unidad esclava consiste en un microcontrolador MSP430G2553 interconectado con un Chip de Control de Motor L293D y MAX485 RS485 comunicación Chip.
Dos motores están conectados a los terminales del chip L293D. El MSP430 espera órdenes de enviar de la PC mediante el cable RS485, de recibir los comandos, que el controlador cambia los motores de encendido y apagado.
Una explicación detallada de la unidad esclava , así como la explicación del código fuente se puede encontrar aquí.













