Este Instructable es un sucesor directo de éste. Al final de esta acumulación, mi proyecto de plato giratorio es casi completa (por fin).
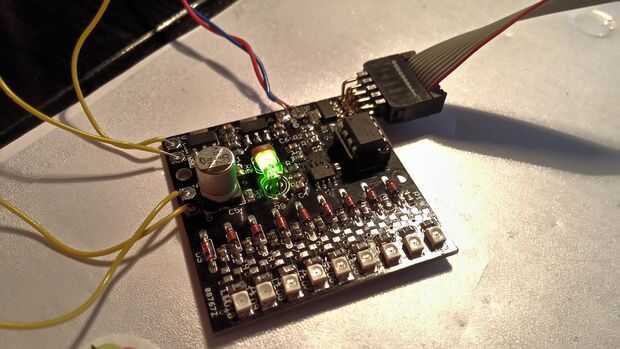
El objetivo es desarrollar un buen aspecto y trabajar PCB con SMD electrónica con un trabajo ATtiny85 + software!
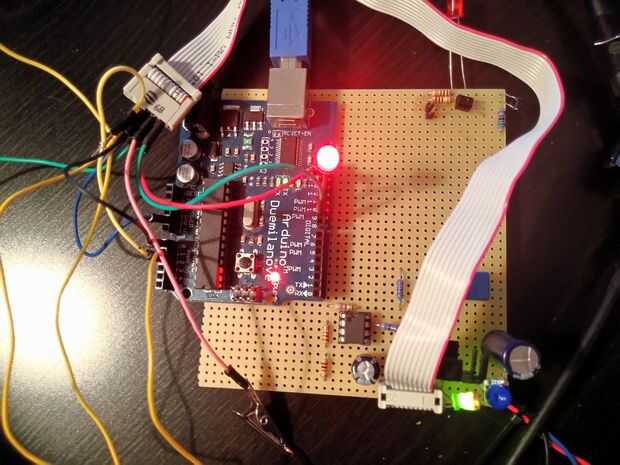
Así, la situación de partida es un perfboard como se muestra en la imagen. Una fuente de tensión de lightdriven, conversión de una señal PWM de Arduino a un voltaje, que un motor está situado en eso perfboard. Todo lo descrito en mi instructables otros. La entrada para el arduino proviene de un generador, lo que indica la velocidad actual. Por lo tanto, el arduino mide la velocidad actual y utiliza un controlador PID para controlar el valor en el valor de la velocidad dada para el plato. Esta speedvalue otra vez se da por una medida de tiempo de ejecución para una vuelta del plato giratorio por una medida de barrera de luz.
La aplicación básica es la siguiente:
--> tiempo de medida para una vuelta
--> Si este tiempo es mayor que la velocidad normal (33.33 rpm para giradiscos)
--> valor de aumento de la velocidad y regula el regulador de PID en ese valor muy rápido
--> Si más lento hacer lo contrario y si su igualdad, fino!


")


")



")
")


