Paso 3: Implementar el código entero...
El código se adjunta al final.
Consiste en general cosas MCU, como preparación de la ADC y tiempo/interrupciones. La parte más importante es la parte de control. El MCU obtiene los valores de ADC, convierte con el controlador PID a una velocidad apropiada del motor y acelera hasta que se alcanza el valor dado.
Este valor no es exactamente la velocidad deseada del motor (33,3 rpm). Por lo tanto, barreras de luz envían una señal por sonido al microcontrolador, que una interrupción de reloj se utiliza para calcular la velocidad real y cambiar el valor para el controlador PID.
Este controla la velocidad después del valor dado. Después de 10 segundos la velocidad es exactamente 33,3 rpm y la medida de hacer topes de velocidad (de lo contrario tendremos oscilaciones debido a las masas del sistema de alta y el regulador de PID).
Si el turntablespeed alcanza un umbral por encima o por debajo del valor de la velocidad dada, la medición inicia otra vez.
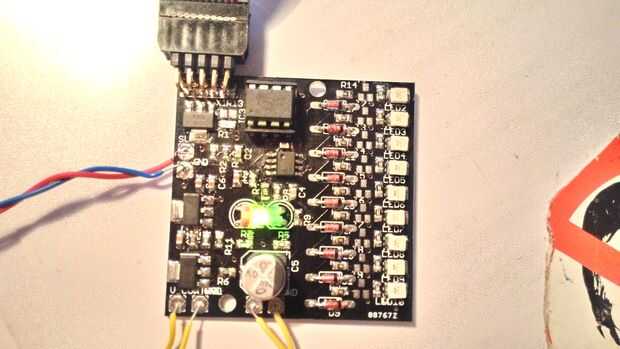
El voltaje de control real y la velocidad del motor por lo tanto es demostrado por el medidor de voltaje del LED en la parte derecha de la placa. El LED en el centro está controlado por PWM de la MCU, mientras su luz controla la tensión de salida. Por lo tanto, se puede ver directamente en el LED, si cambia la velocidad del motor.
Con este dispositivo es controlado mi tocadiscos exactamente a su velocidad de rmp 33.33 - pase lo que pase en el dispositivo. Con la adición de un modo de la velocidad de 44 rpm mi plato será completo.


")


")



")
")


