Paso 4: electrónica
El principio de funcionamiento es tan cerca del juego de como podría conseguir sin realmente ser capaz de disparar los pernos de plasma sobrecalentado:
- El gatillo, las aletas se extienden y activar LEDs/láser.
- Si se presiona el botón de girar mientras el gatillo, la hoja frontal gira 90 grados.
- Cuando se suelta el gatillo, retracción las aletas y apagar los LEDs/láser.
- Las aletas se retraerán si la hoja está en cualquiera de sus orientaciones.
- Presionando el botón de girar con las aletas retraídas no hace nada (las aletas puede golpear el cuerpo principal si giran mientras se retractó).
- Si no vas a compilar la versión extensible (es decir, gira sólo) y luego gire el botón funcionará independientemente del estado de activación.
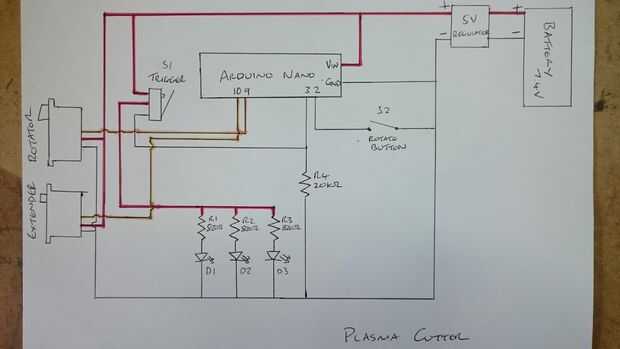
El cortador de Plasma está controlado por un Arduino Nano, ya que son baratos y muy capaz para su pequeño tamaño. Todo esto es accionado por un 7.4V batería de LiPo que es regulada a 5V. Un microswitch SPDT en el gatillo pasa 5V el LED / laser cuando se tira del gatillo. El estado de activación es leído por el Nano para determinar ya sea para extender o retraer las aletas. Un botón de presión sobre el gatillo también es supervisado por el Nano para determinar si se debe girar la cuchilla. Un servo estándar de bajo perfil controla la rotación de la hoja y un micro servo controla las aletas que se extiende, los cuales son controlados por salidas PWM en el Nano.
Cuando el cortador del plasma se enciende (es decir, cuando se inserta la revista) se ejecutará a través de una secuencia de instalación que pone la hoja vertical y las aletas se retractó, no importa qué posiciones estaban en, por lo que se inicia siempre desde un punto conocido.
Placa de prototipado yo solía probar mi electrónica y desarrollar el código de Arduino para controlar los servos. Es un programa relativamente sencillo gracias a la biblioteca de Servo incorporado. Subirlo a tu Nano:
- Versión de ampliación: Descargar y descomprimir el archivo plasmacutter_full.zip e ir a la carpeta que creó.
- Versión estándar: Descargar y descomprimir el archivo plasmacutter_rotate_only.zip e ir a la carpeta que creó.
- Abra el archivo plasmacutter_x.ino en el IDE de Arduino
- Utilice el menú 'Herramientas' para seleccionar la tabla correcta (Nano), procesador (328) y el puerto COM que el Nano está en
- ¡ Sube!
Más adelante necesitará ajustar algunas variables en el código para que tus servos tienen la cantidad correcta de desplazamiento para girar la hoja 90 grados y extender/retraer las aletas correctamente. Esto se cubre en un paso durante la Asamblea.













