


Inspirado en una idea falsa de un"Cupcake", este proyecto de Mecatrónica 1 semestre toma entrada desde una GUI similar a la pintura, envía comandos a través de Arduino y funciona mediante motores paso a paso con varillas roscadas.
El software es todo en Python, usando TKinter. Permite la selección de tamaño (hasta 11 x 13" rectangular), forma (rectángulo o círculo) y el color de la torta, luego se abre una lona adecuada con una paleta de colores y consejos. El Python registra puntos en una ruta de acceso y, a la prensa de un botón, envía el diseño en serie a dos Arduinos.
Uno de los dos Arduinos controla los motores paso a paso (control de rosca varillas en X y Y) para mover a una velocidad constante entre puntos en el camino. Otra Arduino funciona un servo en el eje Z, que utiliza un sistema del estante-y-perno de pistón para dispensar helar. El servo se detiene para recoger entre puntos o pausas para el cambio de color de la boquilla.
La placa de acrílico que tiene la torta está fijada a una tuerca que se monta en la varilla roscada del eje x; el mecanismo de dispensación se mueve en el eje y. Estos dos ejes también se controlan con los interruptores de límite, que comprenden el mecanismo de puesta a cero. También existe un eje z manual que mueve el mecanismo dosificador para ajustar la altura de la torta.
Este producto es toda la obra original de cinco estudiantes en una clase en Franklin W. Olin College de ingeniería. Apareció en la revista Wired, Gizmodo y otros lugares. Todos estábamos aprendiendo Python, había sido introducido a microcontroladores unas semanas antes y había sólo un poco de experiencia en la tienda de máquina. Lo hicimos desde bocetos de diseño y pizarra de SolidWorks para proyecto terminado!
También puede ver nuestro sitio web, aunque a partir del 8/2012, la mayoría del contenido se ha migrado aquí!
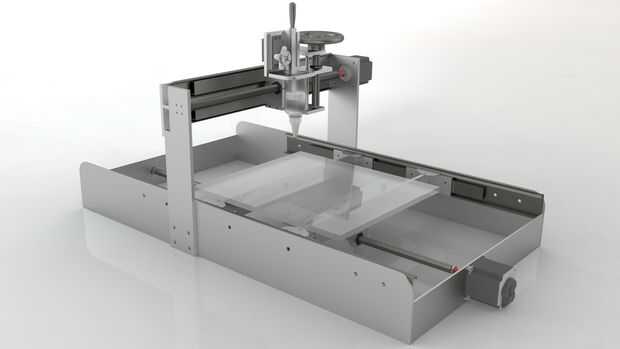
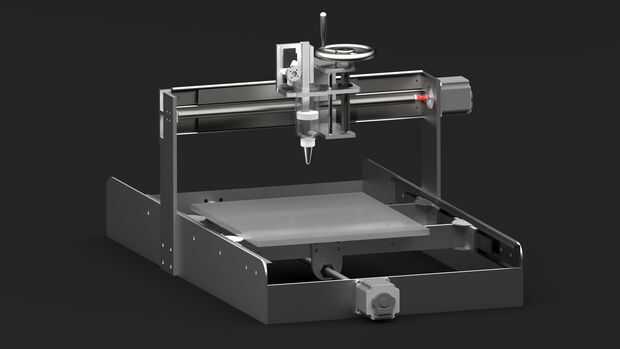
El sistema mecánico



El sistema fue diseñado en SolidWorks, con la asistencia de los supervisores de la tienda de máquina en la Universidad de Olin.
El movimiento de características del sistema en 3 ejes, con control CNC de ejes X e Y, así como dos movimientos independientes en el eje z. La mesa de acrílico que se muestra arriba tiene el pastel, que se mueve hacia adelante y hacia atrás a lo largo del eje x, mientras que la cabeza de la boquilla de helar se mueve en el eje y. Decidimos hacer cada componente se mueva en un eje para simplificar el diseño y utilizar menos material. Entonces tenemos un mango giratorio que permite al usuario ajustar la máquina para las alturas que van desde. 5" a 4". Contamos con un recorrido total de 13" en el eje x y 11" en el eje y.
Eje x
Nosotros decidimos mover el pastel en el eje x en lugar de la cabeza de la boquilla porque se determinó que sería más fácil cambiar el glaseado si la cabeza del inyector sólo se mueve en un eje. Decidimos utilizar deslizadores de cajón como guías, y un motor paso a paso junto a un tornillo de posicionamiento como un medio para mover el pastel linealmente a lo largo del eje. Como el eje de salida del motor gira, da vuelta a la varilla roscada, que hace que la tuerca de control (que está montada en la lámpara de la mesa del pastel) para mover hacia adelante y hacia atrás.
Eje de Y
Mientras que tener la boquilla de helar fija haría incluso más fácil de cambiar las puntas de boquilla o helar, nos dimos cuenta de la torta en movimiento en ambos ejes wouldresult en nuestro que necesitan un tamaño de la base de cuatro veces la superficie de la torta (ya que sería necesario mover el pastel de una manera tal que nos permitió establecer en cada parte de él). Hemos decidido ahorrar material y con mover la cabeza de la boquilla en la y. El cabezal de la boquilla entera se mueve en el eje y, con el mismo movimiento general como x. El recorrido total para este eje es 11". Esto nos permite establecer a lo largo de toda la altura de la torta y mantiene el tamaño de la máquina hacia abajo.
Eje Z
El cabezal de la boquilla con el ajuste de altura, que permite al usuario ajustar los tamaños diferentes de torta. Cabezal de la boquilla también cuenta con el mecanismo de dispensación de helar que consiste en un servo conducir un pistón, que está montado en un rack. La rejilla es entonces impulsada por el piñón, que se monta en el servo. A medida que el servo gira, conduce el pistón hacia abajo, que a su vez distribuye el glaseado. El servo distribuye helar en una tarifa fija mientras que la máquina es dibujar y se detiene para poder hacer líneas separadas. Cuando corremos de helar o el color necesita ser cambiado, helar para dispensar con el fin de permitir al usuario cambiar. Una vez que el glaseado se cambia, el usuario puede presionar un botón para continuar a helar.
Fabricación de
Mientras que compramos algunas piezas, como el mango, el distribuidor de helar y la varilla roscada, la gran mayoría de las piezas en nuestro proyecto fueron trabajados a máquina en casa. Este mantener los costos y nos ha permitido hacer modificaciones en el diseño como lo consideró apropiado. El diseño es ligero, a pesar de su tamaño, porque emplea aluminio fino para la mayor parte de nuestra estructura. Mientras que la estructura de la base es TIG soldado con autógena, el resto del proyecto se puede desmontar para limpieza o el transporte.

La parte eléctrica de nuestro proyecto se centró en controlar nuestros motores. Optamos por utilizar un controlador de Toshiba TB6560HQ para cada motor de accionamiento. Estos controladores pueden fuente de hasta 3 amperios, que era sin duda lo suficientemente alto como para nuestros motores. Tuvimos que doblar y soldar los pines del controlador para conectarlos correctamente a la placa. Disipadores de calor también se unieron al controlador para evitar que los controladores de soplar. Utilizamos 2 controladores, impulsados por una fuente de 5 voltios de potencia. Ambos motores combinados de origen 4 voltios, con una salida total de 12 V.
ArduinoLos dos Arduinos (breadboardable iduinos) funcionan al unísono para diversas funciones. Arduino 1 había interpretado PySerial, del Python y envía comandos sobre dos pernos de lógica y dos pasadores de pulso a dos motores paso a paso según esos mandamientos. Los pernos de lógica determinan la dirección de los motores PAP; los pernos del pulso, su frecuencia de rotación. Es también la salida en un tercer perno de lógica, que de salida a un LED y 2 de Arduino. 2 Arduino controla el movimiento del servo que dispensa el glaseado. Se codificó para lentamente despachar, luego retractarse y hacer una pausa para volver a cargar hasta que se presiona un botón en el circuito (una clavija de entrada para el Arduino). La clavija de entrada 2 de Arduino, salida Arduino 1 de, fue pensada para permitir interpretaciones recibidas sobre PySerial para enviar a través de Arduino 1 a 2 de Arduino, que la dispensación de helar podría detener mediante programación. Esta funcionalidad, sin embargo, nunca llegó a buen término.
Uno Arduino analiza distancias y lógica variables enviadas por la interfaz Python Serial. Traduce estas señales en impulsos que operan x e y motor paso a paso. El segundo Arduino ejecuta el servo que hiela a una tasa constante sobre el pastel. Este segundo ardino es controlado por un perno de lógica en el primer arduino (suministro o no suministro) y por su propio monitoreo del estado del émbolo. Una vez que se ha vaciado el émbolo helar, el servo tira hacia arriba y espera a que una prensa del botón que significa que la cubierta ha sido volver a cargar.
El código de Arduino puede encontrarse aquí.
Python GUI
Los usuarios diseñar pasteles en una pintura gráfica de usuario interfaz (GUI) y AutoFrost convierte en realidad. Hemos escrito nuestra GUI usando Python y Tkinter. Aspirantes a decoradores de pasteles pueden controlar colores y formas de boquilla mientras la elaboración de la torta de sus sueños. Como los usuarios dibujan, recogemos puntos en intervalos iguales de tiempo y almacenar su ubicación, color y forma. Luego analizar por forma color y boquilla (preguntar al usuario cada vez que un cambio es necesario) y enviar a distancia x y distancia y helar o no comandos a nuestros tres motores.
Código Python está descargable aquí.

¡ Disfrute!
-Karan, Tim, Kelsey, Tara y Ilana




 para tus Cupcakes y pasteles")









