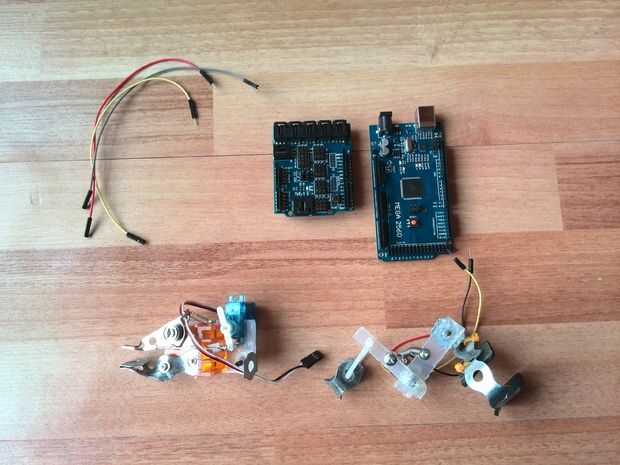


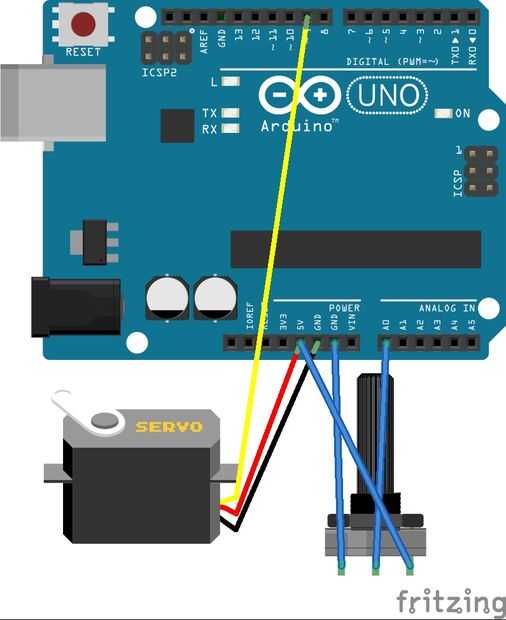
Partes: -1 x Servo (de 1 dedo, usé Micro servo de 9g)
-1 x 50 k potenciómetro (para dedo
- 1 x Arduino Mega o Uno (usé Mega)
-1 x protector del Sensor (opcional)
-3 x cables (rojo, amarillo, negro)
-1 x pinza (por no tener una garra lo hice yo de basura)
-1 x Exofinger (no sé el significado de la misma (:)
Usé eso métodos para este proyecto
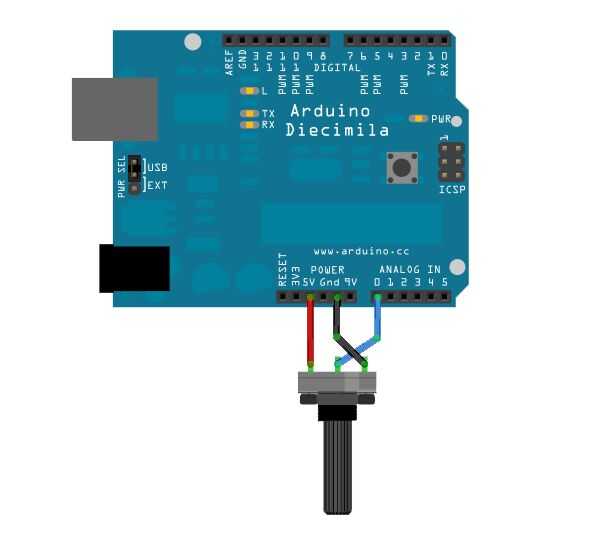
http://Arduino.CC/en/Tutorial/Knob
Espero que usted puede construir su exofinger.
Por favor, video y fotos del control consciente.
Si usted desea utilizar flex sensor no necesitas dedo potenciómetro y exofinger. He utilizado la olla. cuz que quiero hacer más barato.
Códigos: (calibrado mapa de val para mi garra y exofinger!!!!!!)
#include
Servo myservo;
int potpin = 0;
int val;
void setup()
{
myservo.Attach(9);
}
void loop()
{
Val = analogRead(potpin);
Val = mapa (val, 20, 1000, 10, 180);
myservo.Write(Val);
Delay(15);
}
Tómatelo con calma :)
Lo siento por malas palabras...
")












