Paso 3: La garra


Después de hablar a través de varias ideas que decidimos cubrir los requerimientos de base tan pronto como sea posible. Con esto en mente se nos ocurrió un mecanismo simple servo que sería rápido para construir. Funciona similar a un mecanismo de garra. El plan era hacer el brazo de robot con ataduras de cremallera o algo similar.
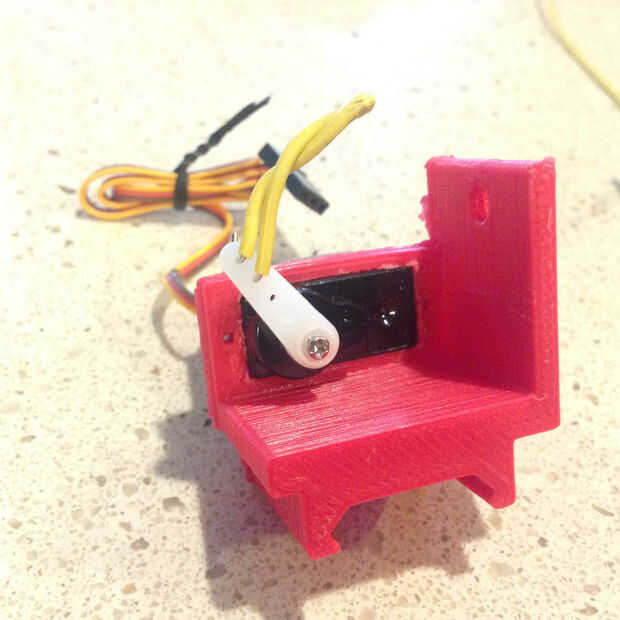
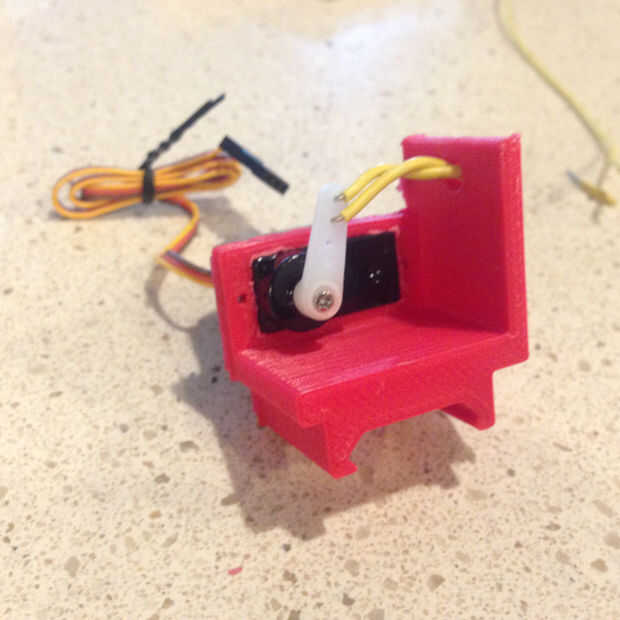
Sabiendo que estábamos usando el drone Iris + modelo y después preguntando un poco por Thingiverse encontramos Iris + telémetro del montaje de glenchung del modelo. telémetro de glenchung ingenioso encajado en el brazo de robot sin ningún hardware o modificaciones. Después de algunas modificaciones pequeñas en Sketchup habíamos añadido un microservo y una placa de captura. Las piezas impresas fueron bastante ajustadas por lo que ni siquiera añadimos tornillos de los servos. Alambre de núcleo sólido un poco en el brazo del servo y en el orificio de la placa de captura. El transmisor de radio fue programado para controlar las posiciones de apertura y cierre. Los ajustes se determinaron mediante ensayo y error.
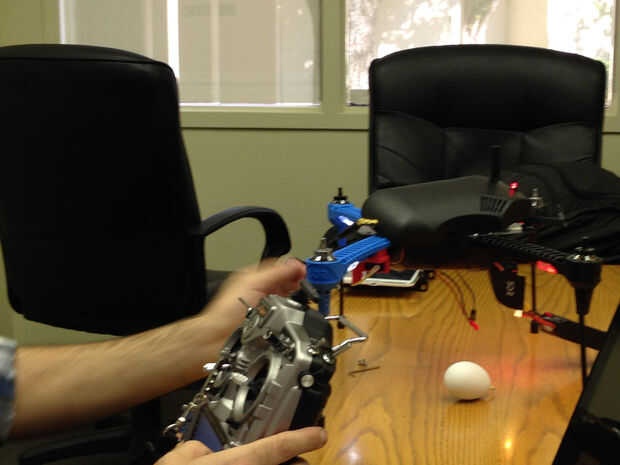
Con una garra impresa e instalado organizamos para un vuelo de prueba y prueba de concepto con FWA. Tuvo éxito y toneladas de diversión! La prueba utiliza huevos falsos para modificaciones fáciles pero huevos reales podrían utilizarse con una longitud corta de cinta aislante que hace un bucle en la parte superior del huevo. La cinta a cabo bien para vuelos cortos. Con una prueba de éxito nos imprimió tres garras más. Uno para cada brazo.
Garra los archivos se encuentran en Thingiverse: http://www.thingiverse.com/thing:855304
(Gracias a glenchung para los archivos de código fuente aquí: http://www.thingiverse.com/thing:745817)






")






")