Este instructable es una demostración de la configuración utilizada para controlar el hardware de modulación de ancho de pulso (PWM) en un RaspberryPi. Si sólo se desvanecen un LED la configuración predeterminada es suficiente, pero si usted está tratando de controlar un servo, un motor que camina o nada crítica tendrá que cambiar algunos de los ajustes.
Se necesita:
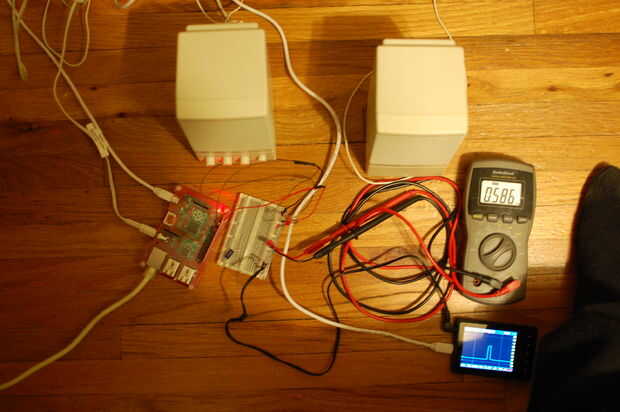
1 - un RaspberryPi
2 - altavoces enchufados en el conector del altavoz (no HDMI)
3 - LED
4 - resistencia para el LED, 220-560 ohmios en serie con el LED
5 - 10 voltios de 25 mf electrolítico Capacitor
6 - multímetro
7 - osciloscopio
8 - 2 cables de puente macho/hembra
9 - protoboard
Si no tienes un multímetro o un osciloscopio todavía puede hacer los experimentos. El condensador se utiliza sólo en el último experimento.
Está bien documentado el hecho de que el hardware PWM hace ruido en los altavoces. Una forma más precisa de lo que es "El RaspberryPi usa la circuitería de audio para crear la señal PWM".
Mi programa de demostración de PWM utiliza las bibliotecas de wiringPi, escritas por Gordon Henderson, para la programación de la GPIO en C.
wiringPi debe instalarse.
Instrucciones para la descarga, instalación y uso se encuentran en http://wiringpi.com
Aplicaciones de WiringPi es pin propio esquema de numeración.
Los números son números wiringPi a menos que se especifique lo contrario.
Al especificar un número pin físico me refiero al número de pin de la cabecera de GPIO.
El pin 1 es el pin PWM de hardware sólo disponible en todos los modelos de RaspberryPi. Es pin físico número 12 en la cabecera GPIO y utiliza el canal derecho.
PIN 24 es el segundo pin PWM de hardware disponible en sólo en el modelo B +. Es pin físico número 35 en la cabecera GPIO, utiliza el canal izquierdo.

")











