

Esta es una breve guía sobre cómo construir a un self balancing robot en un fin de semana. Utilizamos solamente partes de la acción.
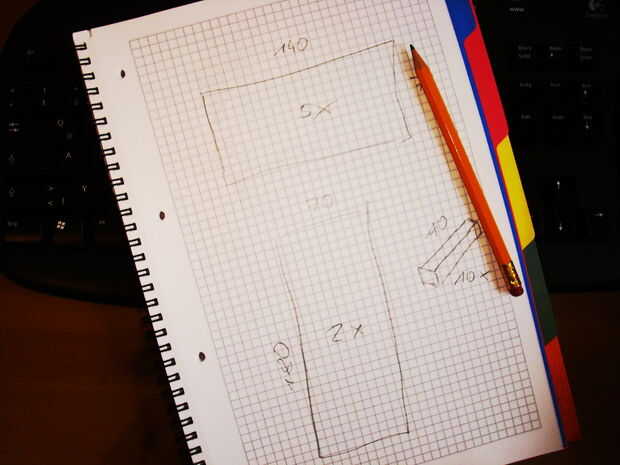
El armazón consiste en placas de plástico rectangulares. Es posible utilizar el pegamento para la construcción del marco sin embargo hemos preferido los soportes de aluminio. Las piezas por debajo de todo lo que necesitábamos es una máquina de perforación de 4mm de perforación broca y un soldador.
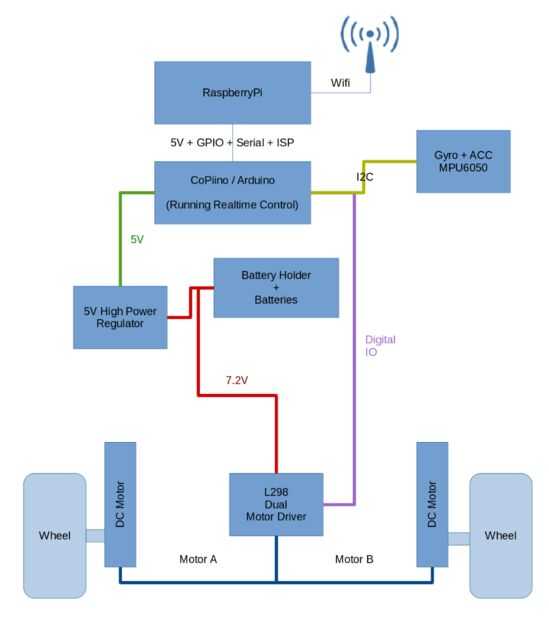
Para el control de cálculo y movimiento posición utilizamos la Junta CoPiino en la cima de la Raspberry Pi. El CoPiino es capaz de reunir datos de la posición de los sensores de movimiento inercial y ejecuta el bucle de control para estabilizar el robot. Datos en vivo se transmitirá desde el CoPiino a través de la conexión en serie al Raspberry Pi. El servidor web incorporado a través de WLAN transferencia datos de control a cualquier navegador (tableta, ordenador portátil, PC,...). Equipado con una cámara el Pi también transfiere un FPV.
piezas estándar
- RaspberryPi (RSonline $24)
- Arduino / CoPiino ( arduino.cc $25 / copiino.cc $30)
- WiFi USB EDIMAX (edimax $10)
- Regulador de alta potencia de 5V (ebay $4)
- Motor + ruedas (ebay $6)
- Puente de controlador de Motor dual (ebay $3)
- MPU6050 Gyro + ACC (ebay $3)
piezas pequeñas adicionales
- Arandelas, tuercas y tornillos M3
- M3 x 5mm tornillos de estancia
- diversos cables y pines
- tirantes de cable









")



