Paso 3: El sistema de Control
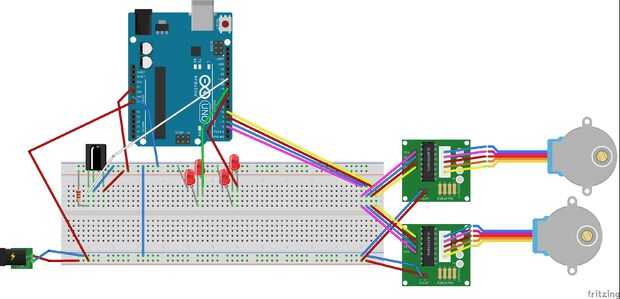
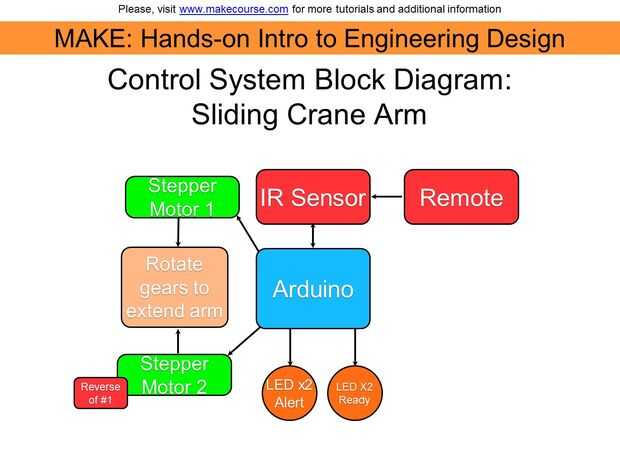
El sistema de control para el brazo de la grúa de corredera se puede dividir en 4 subsistemas. Sí, los motores paso a paso, el receptor IR y los LED es el Arduino. Para ayudar a comprender cómo estos componentes trabajan juntos, hay un diagrama de sistema y un diagrama de Fritzing incluido.
El sensor de infrarrojos permite el Arduino recibir la señal IR de un control remoto, lo que nos permite controlar la grúa. El cableado del sensor IR es bastante sencillo. Aviso, sin embargo, la resistencia de ohmio 10 k.
Los LEDs también son bastante sencillos. He utilizado 5mm LEDs, que me permitió usar los dos en serie sin una resistencia. Cuando hacer la grulla, había soldado los LEDs juntos en pares. El LED conectado al pin 9 sirve como una luz de advertencia, mientras que los conectados a 8 son una luz de marcha lenta/listo. Usé el rojo y verde, respectivamente.
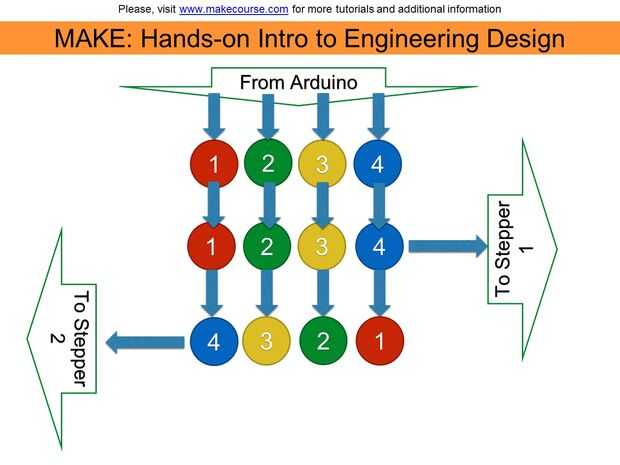
Los motores paso a paso son un poco más. Tenga en cuenta que los motores se conectan a la inversa. Por ejemplo, la fila de la protoboard conecta al pin IN 1 en el controlador de motor es conectada al pin 4 de IN por el otro. Motores paso a paso, en términos simples, trabajan girando en electroimanes en un orden determinado; por el cableado a la inversa, los pasos se ejecutan a la inversa, que significa que el paso a paso se ejecuta en direcciones opuestas. Si los motores gira a la misma dirección, se empujan en direcciones opuestas cuando uno frente al otro. Por cableado ellos juntos de esta manera, confiablemente podemos encender cada motor al mismo tiempo y hacer que gire de forma que empuja a la grúa en la misma dirección.





![KVG Garra máquina [primera página] que tiene instructans](https://foto.askix.com/thumb/170x110/6/b2/6b21590852fcae86fa1bfcc35fef1162.jpg "KVG Garra máquina [primera página] que tiene instructans")







