Paso 3: Servos continuadas

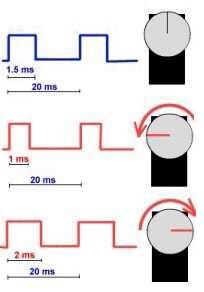
HSR-1425CR se recomienda para proyectos para robots móviles, esto incluye un potenciómetro ajustable al centro el servo puede ser controlado directamente por el microcontrolador enviando impulsos a través de diferentes si desea ejecutar o parar el motor.
")









")


