Inspiración:-
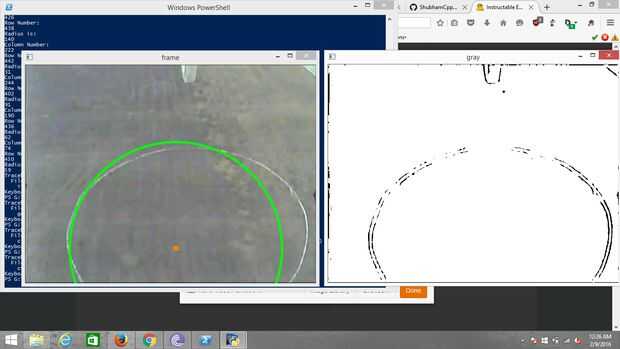
La Idea de esto vino cuando yo estaba jugando con OpenCV y varias funciones. Luego un amigo le pidió que le ayudara a desarrollar un algoritmo que puede detectar que un círculo de una cámara FPV montados a un avión RC y ajustar la alineación del plano correspondiente.
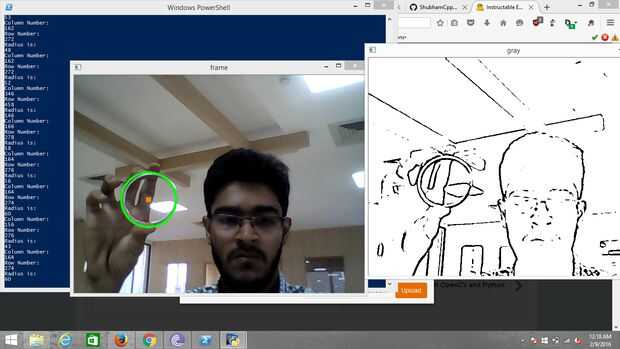
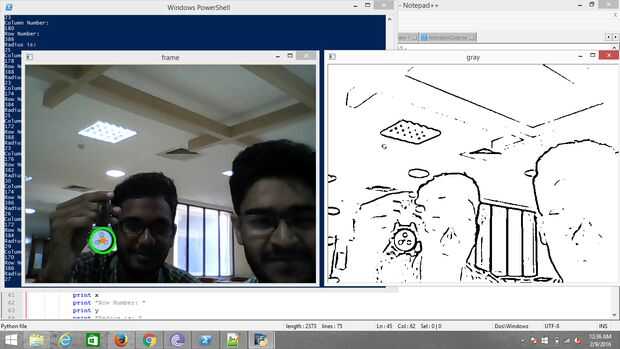
Habiendo tomado un interés en OpenCV, acordado para ayudarle. La idea era detectar el círculo y tiene el centro para que una capacidad de carga podría caer dentro de él.
Sin embargo, usando OpenCV autónomamente en tiempo Real es una mala idea. Utilizando para el observador humano por otro lado no es.
Este código que adjunto es sin embargo un propósito más general uno. Esto detectará círculos en tiempo Real y en escenarios comunes. Se ha cambiado el código para trabajar en un escenario más general, como lo que es trabajar para un sistema FPV requirió mucha calibración de mi parte (como resultado funcionó bien en el escenario de la FPV, pero no del todo en el mundo general común). Por lo tanto, era necesario volver a ajustar algunos parámetros para que sea capaz de detectar círculos en un escenario de diario general.













