Paso 3: conexiones
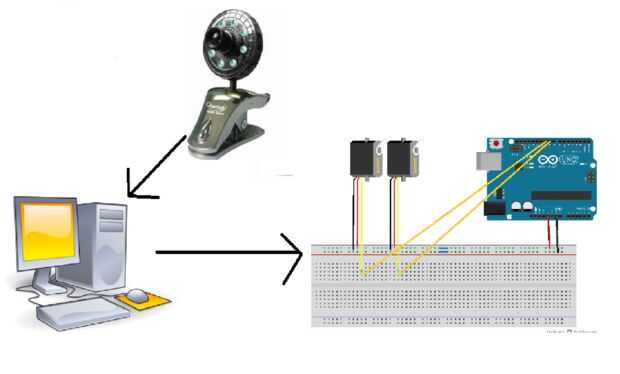

1 Conecte inferior Servo motor cable amarillo con el PIN No - 9 de arduino UNO. (controles de eje de x)
2 amarillo motor conexión superior Servo no cable con la clavija -10 de arduino UNO (eje de y de controles)
3 Conecte el cable rojo del motor servo con 5v provenientes de arduino UNO como se muestra en la figura anterior.
4 Conecte el cable negro de los servos con la GND(Ground) de la arduino UNO como se muestra en la figura anterior.
CONEXIÓN DE LA LEVA DEL WEB:
Conecte la cámara web con el puerto usb de la computadora.
ARDUINO UNO:
Conectar el arduino UNO con el puerto usb de la computadora.
Antes de cargar el código de arduino seleccione Junta y puerto COM correcto en consecuencia.
Se debe cambiar el código de C++ para que coincida con el tipo de puerto y baudios de com de la PC con el Arduino UNO/MEGA. Además, el código de C++ debe saber que puerto USB es usando la cámara web.













