Paso 1: Esquema de sistema
La parte de hardware del proyecto consiste en la matriz del sensor, los muxes y los comparadores. Cada sensor en el sensor de matriz debe generar una tensión analógica de entre 0 y 5 voltios que es directamente proporcional a la intensidad de la luz en el sensor. Los sensores están conectados a las diferentes entradas de los muxes y multiplexado usando una señal de selección de la tarjeta FPGA antes de entrar en los comparadores. Esto reduce el número de entradas de 24 a 3. Los comparadores se utilizan luego para comparar la tensión a una tensión de referencia elaborado por la Junta de la FPGA para generar una señal digital que puede utilizar la tarjeta FPGA.
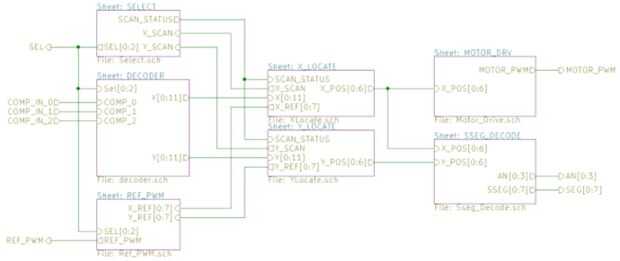
Este proyecto también requiere de una FPGA para trabajar. En nuestra estructura, se utilizó una placa Basys de Nexus 3. La Junta debe tener datos de los sensores de los comparadores externos. La Junta tiene que explorar en los datos del sensor por hacer salir una señal seleccione variable para los muxes externos, que le permite escanear todos los valores de los sensores. La tensión de referencia debe ser controlada por la Junta, así. La Junta debe encontrar el sensor que recibe más luz y almacenar la posición del sensor. Finalmente, la Junta tiene que convertir este valor de posición en las instrucciones para el servo del exterior. La foto de arriba muestra nuestra idea inicial de la arquitectura del sistema para el tablero de la FPGA.







")





