El objetivo de este instructable es hacer una instalación en la que un sensor de ultrasonidos se monta en un motor cinemático.
He considerado un micro servo (90g) y un LED rojo.
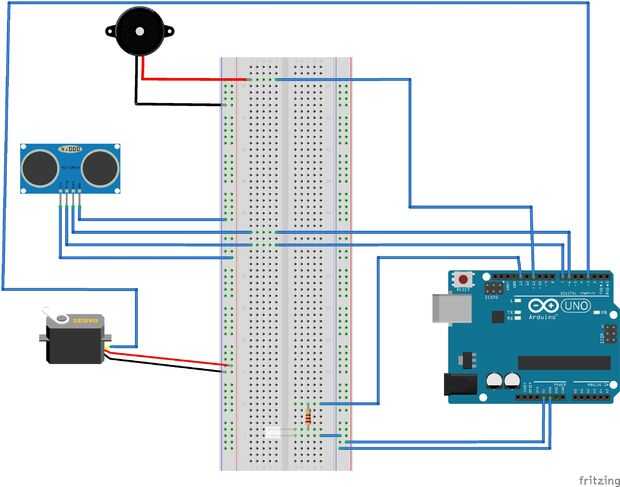
Las conexiones deben ser como se ve en el diagrama de Fritzig.
Colocar el sensor de ultrasonidos y el brazo del servo debe hacerse utilizando doble cara cinta y cinta aislante.
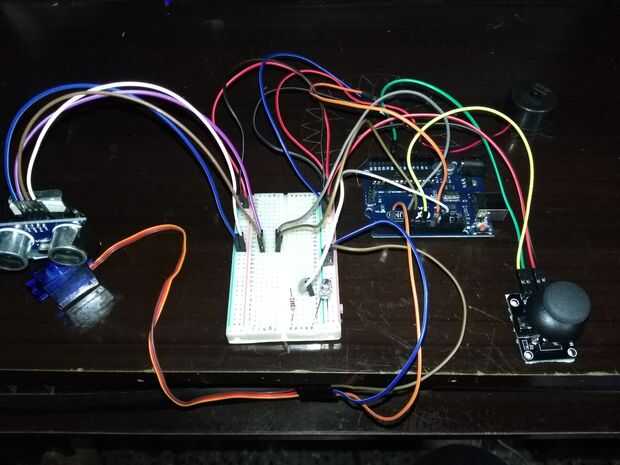
(No considero el joystick, se me olvidó quitarlo)
Partes utilizadas:
1) protoboard
2) tablero Arduino UNO
3) LED rojo
4) Sensor de ultrasonido
5) servo de torre Pro (9grams)
6) piezoeléctrico zumbador
7) resistencia de ohm 220
El código es el siguiente:
#define trigPin 7
#define echoPin 6
#define led 13
#define zumbador 11
#include
int ServoHorizontalPin = 3;
int HorizontalPotPin = A0;
int HorizontalPotValue = 0;
int ServoH_Min = 0;
int ServoH_Max = 180;
int pos = 0;
sonido int;
Servo HorizontalServo;
int HorizontalServoPosition;
void setup()
{
HorizontalServo.attach(ServoHorizontalPin);
Serial.Begin (9600);
pinMode (trigPin, salida);
pinMode (echoPin, entrada);
pinMode (led, salida);
pinMode (zumbador, salida);
}
void loop()
{
para (pos = 0; pos < = 180; pos += 2)
{
Alarm();
}
para (pos = 180; pos > = 0; pos-= 2)
{
Alarm();
}
}
alarm() vacío
{
HorizontalServo.write(pos);
Delay(25);
larga duración, distancia;
digitalWrite (trigPin, LOW);
delayMicroseconds(1);
digitalWrite (trigPin, HIGH);
delayMicroseconds(2);
digitalWrite (trigPin, LOW);
duración = pulseIn (echoPin, HIGH);
distancia = (duración/2) / 29,1;
Si (< 20 a distancia)
{
digitalWrite (led, alto);
analogWrite (11, 20);
}
otra cosa
{
digitalWrite(led,LOW);
analogWrite (11, 0);
}
}
Por favor prueba y me dar respuesta.
Se aceptan alegremente cualquier improvisaciones.













