Paso 1: cableado
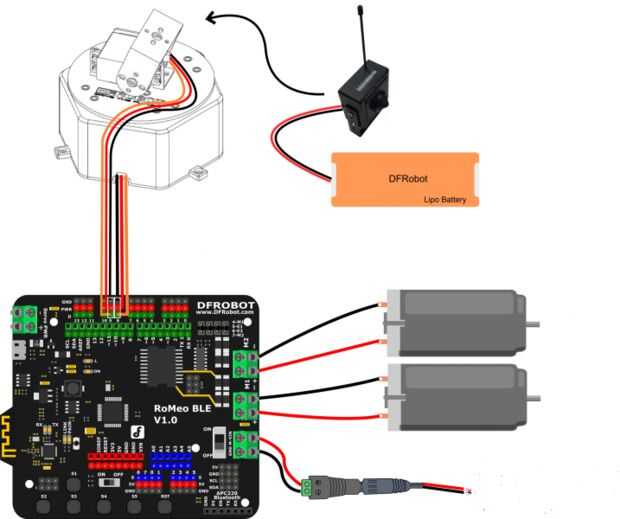
1 el motor izquierdo se conecta a M2 y M1 conecta el motor adecuado. (prestar atención a los polos)
2. motores necesitan separar la fuente de alimentación. Puerto de entrada de alimentación se localiza junto al puerto de salida del motor. Apague el tablero primero y luego conectar la batería a este puerto.
3. Conecte el servo superior de la montura al pin D8.
4. Conecte el servo más baja del Monte con conector D9.
5. Instale la cámara en el Monte y el poder que up.6. Conecte el receptor de Bluetooth de la cámara al ordenador.








")




")