Paso 15: calibración

Si el robot se mueve en una plaza aproximada, es tiempo para colocar papel y poner un lápiz en él.
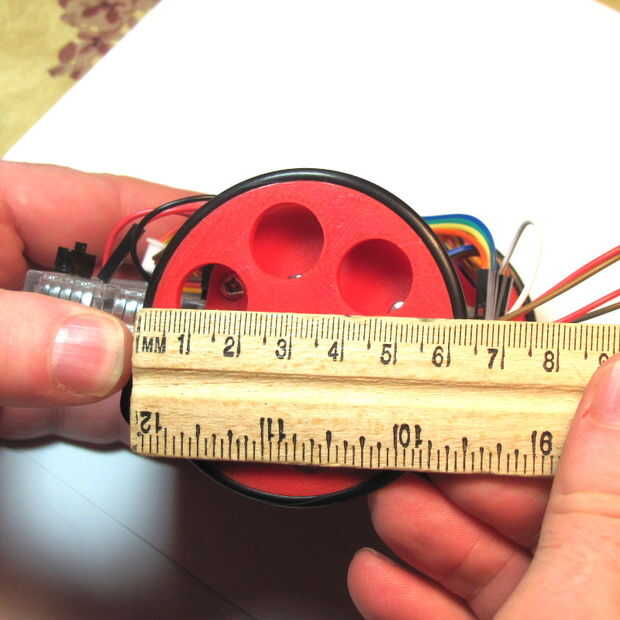
Medir el diámetro de la rueda (imagen 1) y base de rueda (imagen 2) en milímetros.
La configuración de la calibración en el código es:
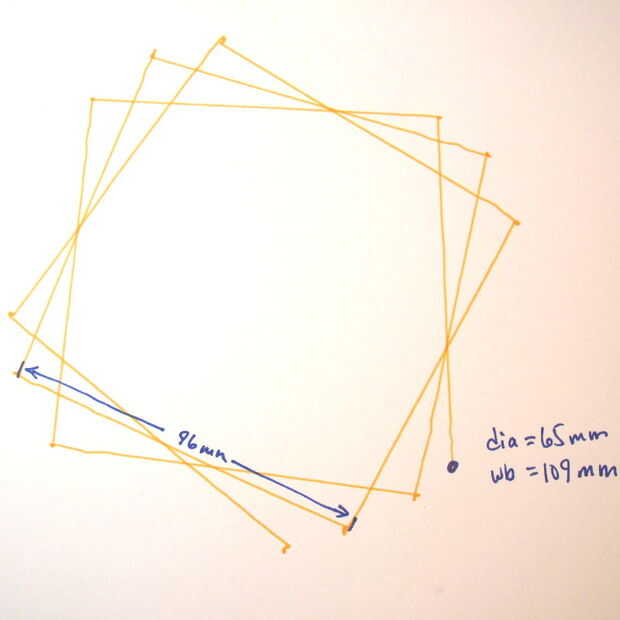
Empecé con un diámetro medido de 65 mm y se pueden ver los cuadros de rotación hacia fuera o hacia la derecha de cada paso (imagen 3).
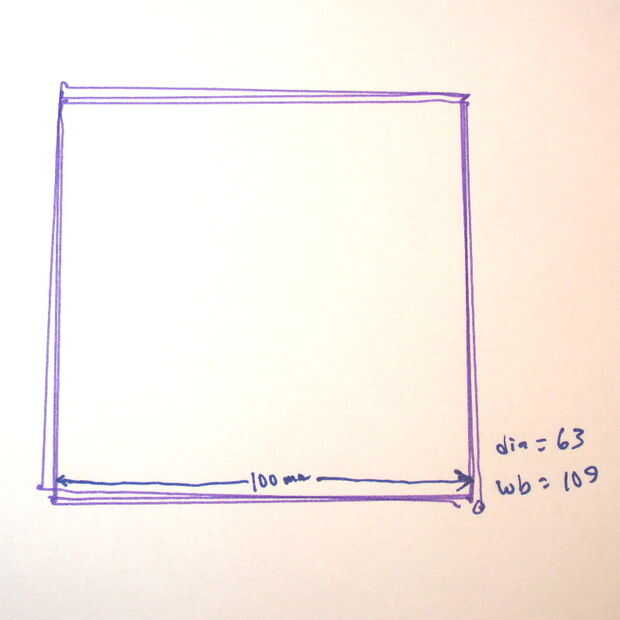
Finalmente llegué a un valor de 63mm (imagen 4). Se puede ver que todavía hay un error inherente debido a latigazo de engranaje y tal. Lo suficientemente cerca para hacer algo interesante!
 Básicos Arduino Robot buscador de luz!")











")