Paso 12: Prueba y calibración
Ojala que ya cargaste el firmware en el paso 2. Si no, hazlo ahora.
El firmware de prueba sólo dibuja un cuadrado repetidamente por lo que podemos verificar dirección y precisión.
- Coloque su robot en una superficie lisa, plana y abierta.
- Conecte la alimentación.
- Mira tu robot dibuja cuadrados.
Si no está viendo luces en el microcontrolador, volver atrás y troublshoot de la energía como en el paso 8.
Si el robot no se mueve, verifique las conexiones de alimentación al controlador de darlington en el paso 9.
Si el robot se mueve erráticamente, comprobaremos las conexiones del perno para el microcontrolador y darlington el controlador en el paso 10.
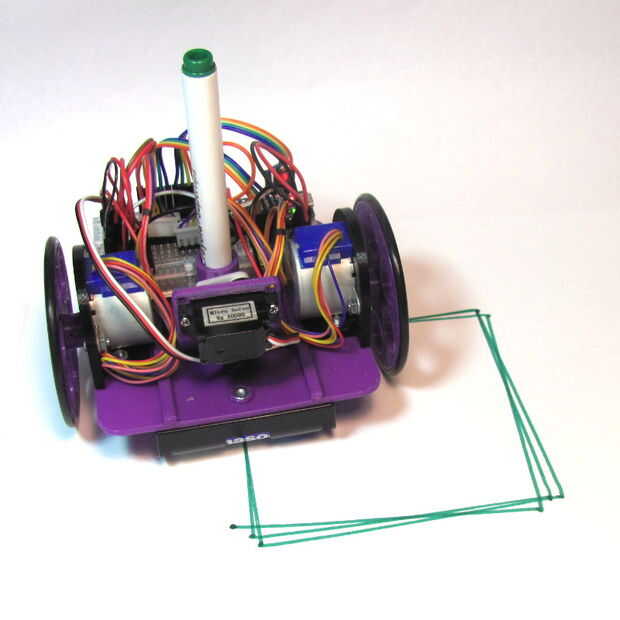
Si el robot se mueve en un cuadrado aproximadamente, es tiempo para colocar papel y poner un lápiz en él (imagen 1).
Los puntos de calibración son:
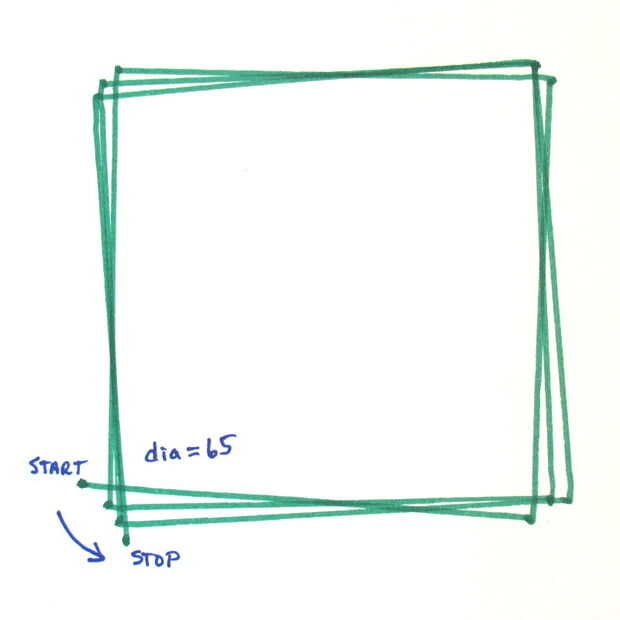
Empecé con un diámetro medido de 65 mm y se pueden ver los cuadros de rotación hacia adentro (imagen 2).
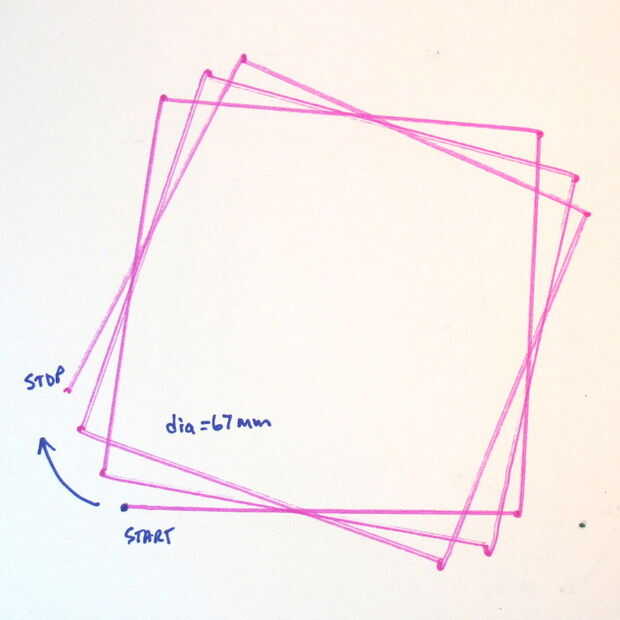
Aumenta el diámetro a los 67, y se puede ver que fue girando hacia el exterior (imagen 3).
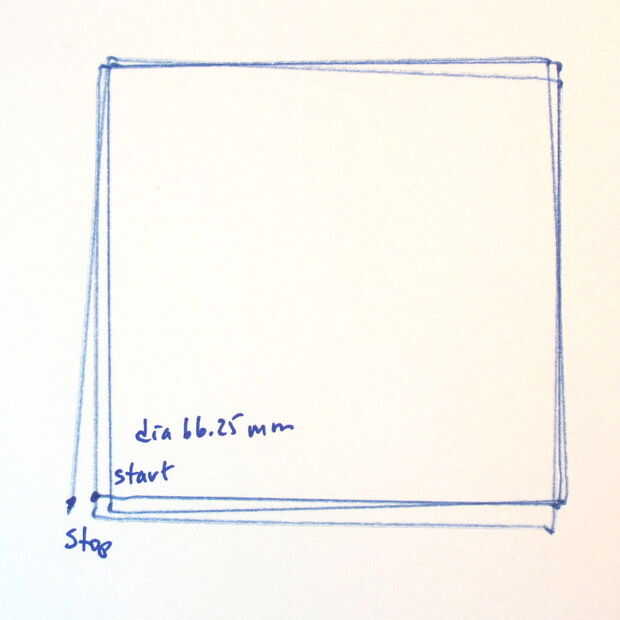
Finalmente llegué a un valor de 66,25 mm (imagen 4). Se puede ver que todavía hay un error inherente debido a latigazo de engranaje y tal. Lo suficientemente cerca para hacer algo interesante!



")




")




