Paso 2: El interruptor como columna vertebral

Para activar un SPDTswitch común con la atracción magnética del robot una palanca grande es necesario. Gran palanca significa gran movimiento así que pretendían integrar el interruptor y palanca en el movimiento principal de "besos" y tiene el se sirva de columna vertebral y el cuello.
Para eliminar cualquier tipo de soldadura, la misión fue integrar el interruptor, el LED y la batería en el tronco del robot.
Los orificios de montaje del interruptor son sólo 2,5 mm. Como pernos largos con ese diámetro no son muy comunes, decido no utilizar estos agujeros para mantener el interruptor en su lugar en la estructura de capas. En su lugar utilicé la libertad de forma y precisión láser corte ofrece y diseña una forma sujeta firmemente el interruptor. He medido el interruptor y dibujó la forma. Como primera aproximación simple que no tomé en cuenta cualquier separación. O realmente dibujando sólo el interruptor de medida, la mitad de la anchura del corte láser (0,1 mm) sirve como despacho.
Paso siguiente era mantenerla presionada contra una de las patas del interruptor, mediante el diseño de una "primavera" basada en un corte estrecho. Experimenté con un pedazo de hoja de acrílico, corte con una sierra para metales. La eficacia y la durabilidad es algo que debe comprobarse en la práctica, pero tengo una buena impresión del láser cortar piezas.
Tomé el grueso de la batería de una hoja de datos, como con mi pinza metal hubiera cortocircuitos la batería (3,2 mm para una CR2032). Para poner la tensión en el resorte resta 1 mm de ese espesor al hacer el láser corta plantilla de diseño.
Luego vino el reto de conectar el LED sin soldadura. En primer lugar el cut-out para el LED toma en cuenta el lado aplanado en su borde, por lo que se puede poner en más que una forma y la polaridad debe venir siempre a la derecha durante el montaje. Una de las patas de los LEDs (la-) pasa a través del agujero en la media pierna del interruptor y se lleva a cabo en lugar por la forma del recorte. La otra pierna (+) se presiona contra el lado de la batería. Esta pierna está doblada hacia abajo hacia la "primavera" con la batería.
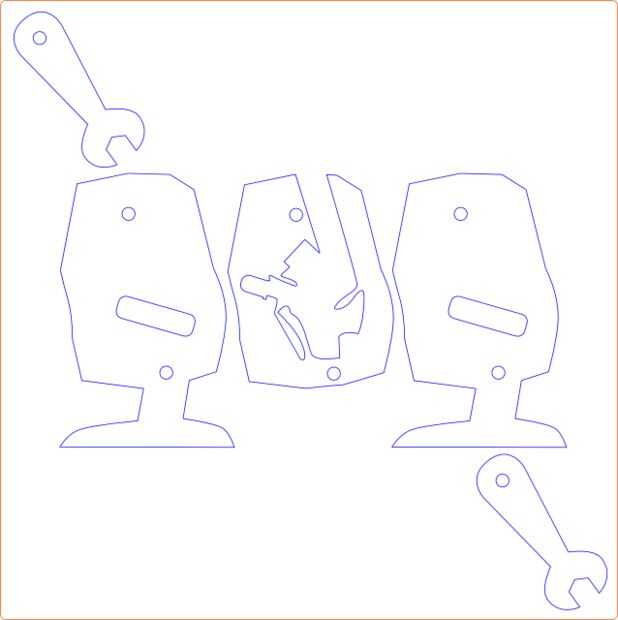
La parte media con el interruptor, LED y la batería se sujeta entre dos partes de "pata", con las tres capas atornillados v (con papel como separadores). Las partes laterales se ranuran para dar espacio a la batería y permitir remplazarla sin desarmar. Los brazos se agregan a los pernos superior. Para la última tuerca puede utilizarse un brazo ya conectado al otro robot.
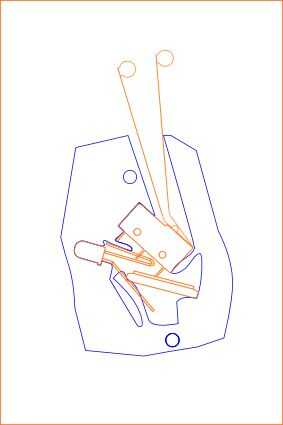
El movimiento de la palanca se comprobó en una "sección" Dibujo de los dos robots de besos. Cuando las partes llegaron algunos puesta a punto era necesario. Primero cambió el ángulo del cuerpo inclinado hacia adelante para conseguir la cabeza lo suficientemente cerca para los imanes trabajar. Si usted toma una mirada cercana al vídeo en la introducción puede notar los pies fueron enarenados y algunas esponjas de cinta fueron agregados para agregar otra vez altura de som (ensayo y error). También fue agregado un trozo de cinta de espuma dejar la palanca y la cabeza para retroceder a la fecha. Fotos seguirá. El resultado final ya está implementado en el laser cut diseño atado paso 1 de este Ible.













