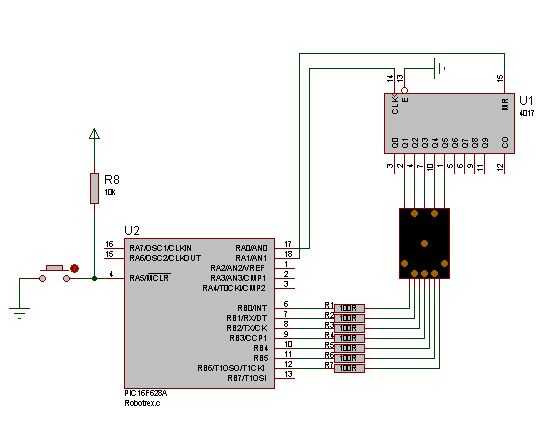
Paso 2: Circuitos etc.
una y dos sensores de sonido. Sensores de micrófono de condensador independiente dos en la derecha e izquierda. Con estos sensores, el robot puede escuchar los sonidos alrededor de ella y también distinguir entre sonidos procedentes de la izquierda y la derecha.
b - fotosensor. Se trata de un fotodiodo situado en la parte delantera de la Robotrex hacia adelante. Con este sensor, el robot puede detectar y medir el nivel de luz alrededor de él como un valor de 5 bits (0-31).
detección de obstáculo de c-Infra roja (IR). Con este microprocesador (chip de OZZ-IR-DIS) circuitos dedicados Robotrex pueden percibir los obstáculos en su camino, así como obstáculos en los lados izquierdos y derecho dentro de un límite de casi 40cms. Los sensores IR de Sharp también pueden utilizarse de una manera similar.
Junto con los sensores, el Robotrex tiene una pantalla de "Humor" que consiste en una pantalla de matriz de puntos LED 5 x 7 donde puede mostrar su estado de ánimo como sonriendo, llorando, miedo etc. caras (total 16). La pantalla de estado de ánimo puede ser construida y utilizada como un módulo independiente. Mientras que la pantalla de estado de ánimo muestra las emociones de la robusteza el procesador principal puede también producir una variedad de efectos de sonido para mejorar la comunicación del robot con el mundo exterior.
 (impresión 3D)")












