Paso 1: Instalación mecánica y eléctrica
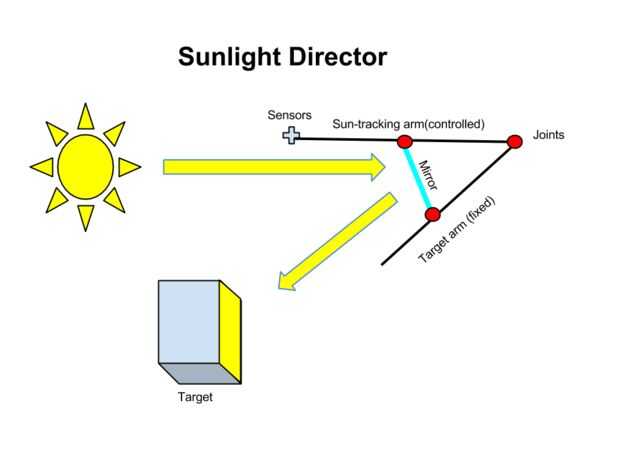


A. la configuración de la trayectoria de la luz:
-Brazo seguimiento solar (móvil)
-Brazo de dirección destino (fijo)
-Espejo (unido a dos brazos equidistantes del punto de pivote)
El brazo de seguimiento solar se fija a la base de la cacerola/la inclinación. Como las cacerolas de base y se inclina, así que se armará el seguimiento solar. Objetivo brazo señala el objeto que queremos iluminar. Este brazo está fijado en lugar, para que siempre apunte a nuestro objeto.
El espejo está conectado a ambos brazos. Tiene que ser capaz de deslizarse sobre uno de los brazos, para mantener la misma distancia desde el pivote (ver foto que muestra una hendidura en la plataforma del espejo). El objetivo es asegurarse de que el espejo es equidistante desde el pivote, sin importar cuál es el ángulo entre los brazos - de esta manera, la luz viene el brazo de seguimiento solar y se refleja a lo largo del brazo del destino. El espejo también tiene que ser perpendicular al plano de los dos brazos.
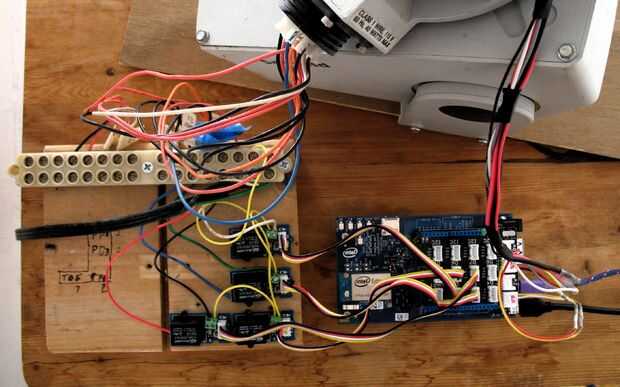
B. Configuración electrónica de
Esta aplicación específica utiliza los siguientes componentes:
1) microcontrolador Intel Edison
2) sensores de luz Grove x 4
3) protector del sensor Grove
4) relés eléctricos x 4
5) base Pan/Tilt de la cámara (puede obtenerse en línea http://www.mcmelectronics.com/product/82-12440?sc...
Edison de Intel le ofrece para este proyecto:
- Conectividad Wi-Fi
- Entradas analógicas y digital GPIO
- Potencia de cálculo suficiente para desarrollar aplicaciones complejas
Los cuatro sensores están dispuestos en matriz de 2 x 2, con una barrera que los separa. Los cuatro cuadrantes nos permiten conocer cómo mejor posicionar el brazo de seguimiento solar. Por decisión de la izquierda, en definitiva valores luz de sensores 1 y 3 y comparar el resultado con la suma de 2 y 4. Para arriba/abajo decisión, suma los valores de los sensores 1 y 2 y comparar el resultado con 3 y 4. Si la diferencia porcentual es mayor que el valor de umbral (5%), enviamos un comando mover.
Microcontrolador con información de la fuente de los sensores. Microcontrolador decide si el brazo tiene que volver a colocar. Movimiento se realiza utilizando una base de pan/tilt cámara de seguridad. Esta base particular utiliza entradas de alto voltaje, por lo que necesitamos controlar el uso de relés de corriente alterna. Esta parte de la implementación es específica a la base que está utilizando. En nuestro caso, necesitamos dos relés por dimensión. Para cada dimensión, primer relais controles de potencia, segundo relé dirección de controles.










")


