Paso 4: El electonics
Los componentes de
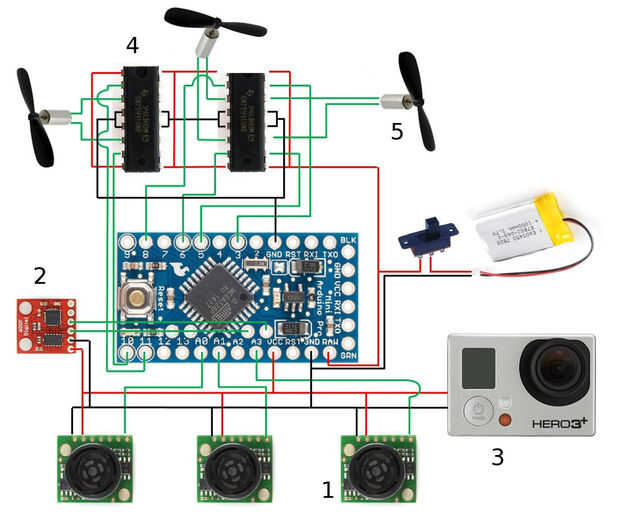
Pensé que sería cool tener un globo que está tomando fotos y videos. También quería algún obstáculo detección y estabilización.
Por lo tanto he añadido tres sensores sonic ultra (1); dos para detectar todo en el frente de izquierda y derecha y uno para medir la distancia hasta el techo. Yo tenía problemas con interferencias (aunque se menciona en la hoja de datos, entonces usted necesita utilizar encadenamiento http://www.maxbotix.com/documents/LV-MaxSonar-EZ_Datasheet.pdf ver lo único importante era que los sensores tienen que punto suficientemente aparte, los conos no deben superponerse como el sonar de los sensores interfieran entre sí. Hace un sensor de detectar un obstáculo, cuando en realidad es un sensor de sonido para hacer su trabajo de la leña.
Gyrsocope (2) estabiliza el movimiento después de dar vuelta. Importante es (a diferencia de se muestra en la imagen donde todo se produce sólo en la carcasa), que eligió un eje (en mi caso era Z) y alinéelo tanto como sea posible por lo que es paralelo al suelo. Así rotación del balón resultará en el giroscopio mide el cambio en el valor de Z solamente. Obviamente puede usar algunas matemáticas de lujo de lo contrario, pero esto funcionó muy bien para mí. Solo pegué el sensor en el tablero de madera de balsa y que ya era suficiente para que funcione.
La GoPro (3) es ideal para la inicialización de fotos remotamente y finalmente los Puentes de H (L293D) para los motores + accesorios (4). Potencia de puente H líneas deben conectarse directamente a la batería, no va sobre el arduino ya los motores producen mucho ruido! Esto puede inutilizar las lecturas de los sensores. Pero no olvide conectar a tierra de los puentes H para arduino aunque. Además, los puentes de H deben conectarse a PMW pines para que funcione correctamente.
Si eres valiente puede desarmar un cable Mini-USB y agregar el GoPro en el conector USB a su circuito conectando + VCC en su adruino y la tierra. De esa manera usted puede sacar la batería de la GoPro y ahorrar bastante peso. Esta voluntad resultados en menos tiempo de funcionamiento sin embargo. Como el globo no necesita ninguna energía de la batería para mantenerse en el aire, la batería (3,7 V, 1000mAh es bueno) dura aproximadamente 2 horas con fotografías ocasionales. Extrañamente las mismas pilas de diferentes empresas pueden tienen diferentes pesos, así que trate de conseguir uno con tanta mAh como posible, sino que también es más ligero.
Conectar (componente -> Arduino)
Sensores de ultrasonidos
Alimentación + tierra -> Arduino VCC y tierra
BW -> A0, A1, A3 (no recuerdo por qué me salté A2, probablemente ninguna razón)
Gyro + acelerómetro
Alimentación + tierra -> Arduino VCC y tierra
SDA (Pin por GND) -> Arduino SDA (A4)
SCL (Pin por SDA) -> Arduino SCL (A5)
Puente en H
Pin 4,5,12,13 -> GND de Arduino
Pin 1,8,9,16 -> Arduino crudo
Pin 2 -> Arduino Pin 11
PIN 3 -> Motor 1.a
PIN 6 -> Motor 1.b
PIN 7 -> Arduino Pin 10
(del mismo va para el H-puente con Motor 2 + 3)
Siguiente el código!












 dirigible no rígido del edificio con Servos hackeado")
