Paso 7: Cableado del dirigible
Originalmente utilizó muchos pesados cables y conectores en nombre de la pulcritud y comodidad, pero dio para arriba después de ver cuánto peso había añadido. El resultado es un diseño un poco enredado pero muy funcional.
Debe iniciar con la construcción de sus puentes de h, si no lo has hecho ya, busca en el sitio web de Mark Tilden un diagrama excelente. Probablemente usted querrá construir en tableros pequeños así que usted puede probarlos con sus motores individualmente antes de soldar en.
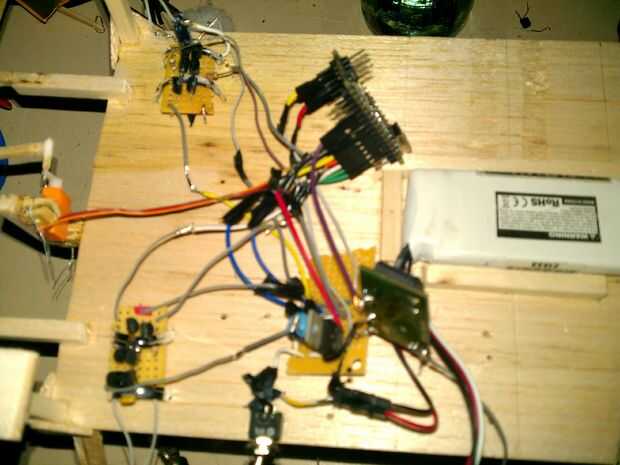
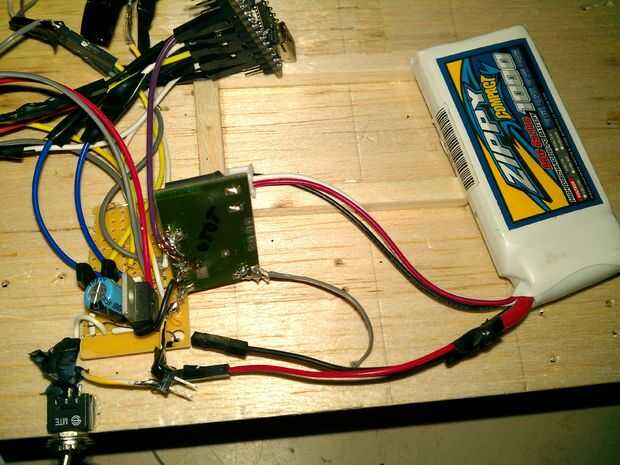
Una vez que los tienes, debe comenzar a pensar en alimentar sus circuitos. Corté el conector de la batería llegó con--usted debe demasiado, te ahorra 10 gramos--y lo reemplazó con luz cables terminados en 0,1" tomas de corriente, por lo que todavía se puede quitar fácilmente para la carga. Conecta a encabezados de pin que soldó en la placa a través del agujero. También puse el 7805 en el tablero, por lo que los cables de alimentación de los servos, radio y Arduino se originan a partir de ahí. Los dos transistores NPN que los motores de (y que el Arduino PWM) están también en la Junta, con el pin de "coleccionista" conectado directamente a la 7.4V de la batería. Una vez más, consulte el diagrama.
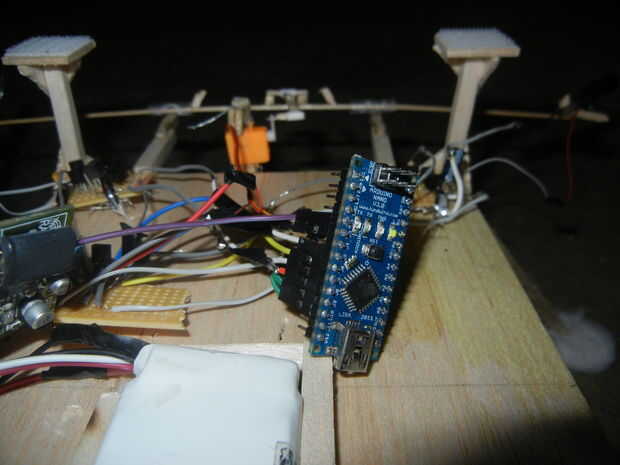
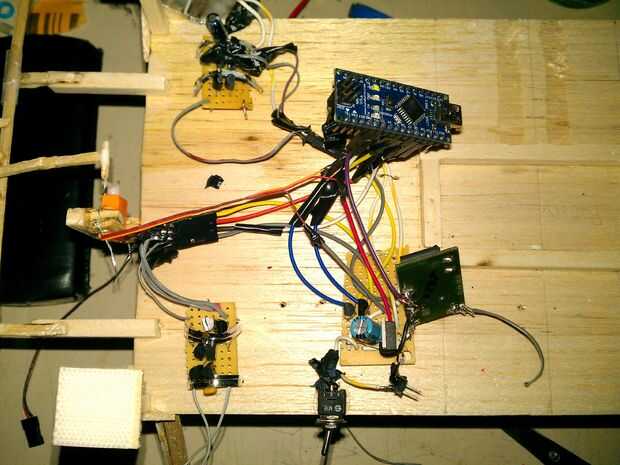
Usando los cables de toma de corriente, había conectado el Arduino al puentes de h, radio, servo y motor del transistor. Ese chip verde dio vuelta a su lado es el módulo TX. La ubicación de los puentes de h es bastante obvia, uno a cada lado del servo. Si usted consigue la orientación de los motores incorrectos (por ejemplo, empuje hacia adelante y hacia atrás), recuerda que es muy fácil de cambiar por intercambio de pines de dirección en el Arduino, o simplemente cambiando una línea de código.













