


La idea principal es bastante simple: conseguir un módulo de reconocimiento de discurso, enlazar a un microcontrolador, generar la correspondiente señal PPM, enviarlo a un módulo de HF. Recibir la señal con un receptor estándar y conseguir que los servos se mueven, más kilómetros de distancia.
De esta manera uno tiene que usar un auricular y video gafas sólo al FPV conducir con ambas manos libres.
No estoy seguro de qué hacer con las dos manos libres para todos dejo adivinar qué utilizarlos para :-)
Nota: esta solución es demasiado lenta para el control de todo lo que se mueve rápido pero puede ser apropiado para pequeños rovers y tal.
Proyectos similares más utilizan el módulo de voz para conducir un coche directamente, es decir, servos se enganchan a la Arduino.
Plus: fácil de hacer
Menos: el usuario tiene que estar dentro de la gama de audio del dispositivo, gama muy pequeña de
Además, hay algunos proyectos que utilizan los módulos Xbee de 2,4 GHZ para extender el rango.
Plus: amplia gama (100m, tal vez?)
Menos: límite más completa, aún no es adecuado para FPV debido a gama
Mi solución.
Plus: gama limitada sólo por usado transmisor y el receptor módulos, se puede personalizar para cualquier equipo RC
Menos: necesita od un poco conocimiento de tecnología de la señal PPM, Arduino interrupciones y los temporizadores
Para propósito FPV, supongo que por lo menos 1km de la gama para la verdadera libertad. El elegido TX/RX es de Frsky (con telemetría), que es una solución realmente cheapo pero confiable. Además, la telemetría signalize (por pitidos) en el borde de la estufa.
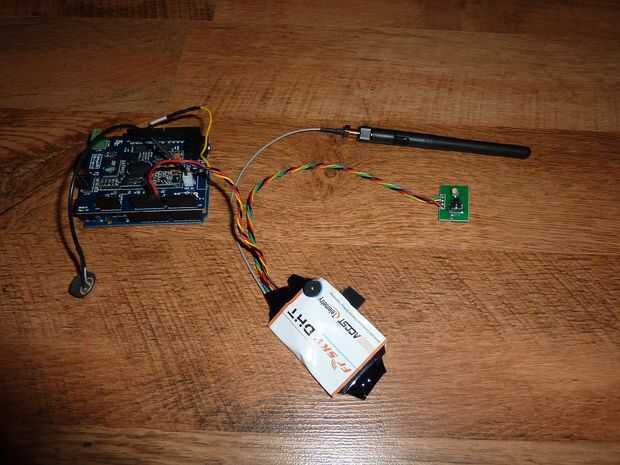
El hardware elegido:
Módulo Veear EasyVR (escudo) con micrófono (60$)
Arduino Uno (20$)
altavoz de 8 ohm 3W
Módulo de transmisor diy FRSKY DHT (20$)
Receptor de telemetría de FRSKY D8R-II (20$)
El equipo FPV (opcional):
5.8GHz sistema de TX/RX de 200mw/400mW (~ 80$)
video gafas (250$)
Par de antena CL RHCP (40$)
El código pidió prestado el código generador de PPM por Hasi y el script de ejemplo para el módulo EasyVR.
Para probar la salida PPM, he hecho un simple cable de audio mono.
Un lado va el micrófono de la PC y el otro lado con el conector de salida digital del arduino donde sale la señal PPM.
El comportamiento de la salida y canal PPM es probado por el programa de PPM Audio, o programa llamado Zelscope.
El PPM Audio es realmente conveniente para comprobar la presencia de la señal PPM, pruebas de verdad tener el Zelscope son una necesidad.
Este ámbito virtual como bien muestra la calidad de la señal así cualquiera misshapes que puede ocurrir.
EasyVR
El módulo puede ser adquirido en muchos concesionarios, como Robotshop, Sparkfun, Tigal, o incluso de Ebay. está disponible ya sea
"desnudo" o como un escudo. Viene con un micrófono. He comprado la versión del escudo.
Lo que necesitamos para el proyecto:
Documentación: http://www.robotshop.com/content/PDF/easyvr-user-manual-vrb-001.pdf
Biblioteca de Arduino:
EasyVR comandante: http://download.tigal.com/veear/EasyVR-Commander-3.4.10-QS-5.2.1.zip
La biblioteca contiene scripts de ejemplo que pueden utilizar. El módulo EasyVR se presiona simplemente en el Arduino Uno.
El módulo dispone de 4 pins para puentear, SW, HW y PC. Para comunicarse con Arduino o PC el pin se recomienda conseguir puente SW o la PC.
Comandante EasyVR
El módulo utiliza puente de software un poco (inicializado en código Arduino) para la comunicación con el comandante EasyVR, cuando el puente no está listo la comunicación no se puede hacer.
El comandante se utiliza para configurar diferentes grupos de comandos de voz, crear, editar y borrar comandos y enseñanza para el módulo. La configuración es bastante sencilla, más sobre está escrito en el manual EasyVR.
Receptor y el módulo HF de Frsky
Se pueden comprar de muchos lugares, mejor comprar de Hobbyking, donde es barato.
El DHT (DJT puede utilizarse también) PPM de entrada y módulo diy tiene solamente más, menos. Tenga en cuenta que la tierra del Arduino y el módulo DHT tiene que ser común para un funcionamiento correcto. Para ello, lo más fácil es alimentar el Arduino de la entrada (cualquier 2s lipo hará el trabajo), encender el módulo DHT de Arduino pernos Vin y GND. Entrada PPM del módulo se conecta al pin del Arduino digital 9 o 10, según el código generador PPM.
Puede utilizar cualquier receptor compatible con el módulo DHT.
Nota: Se pueden utilizar cualquier módulo HF y receptor que comprende el estándar protocolo PPM con el cambio ya sea negativo o positivo.
El codificador PPM
Cualquier código de generación de PPM (codificador PPM) puede hacer el trabajo, que utiliza interrupciones del temporizador para la generación de señal. Lo principal es, cuando mediante código del codificador interrumpe entonces la PPM se ejecuta en segundo plano. Sólo uno tiene que cambiar el valor de las variables, que representan a diferentes canales.
Estos valores van desde 900 a 2100 (valores en microsegundos) y dependen de los comandos de voz del módulo EasyVR. Al decir frases diferentes estos valores obtiene alterado en el código, provocando la modificación de la señal.
El problema es que el código EasyVR utiliza SoftwareSerial por omisión, que interfiere con el temporizador del codificador PPM. Así el código tuvo que ser modificado para usar HardwareSerial en lugar de otro.
Tenga en cuenta que esta modificación deshabilita la comunicación entre el PC y el Arduino como el perno de puente EasyVR tiene que establecerse en HW. Así que en cualquier momento cuando el nuevo código se necesita entrar uloaded en Arduino, el pin de puente EasyVR tiene a insertarse de nuevo a SW o PC y para la funcionalidad correcta debe establecerse en HW.
Frsky DHT del módulo de prueba, los siguientes valores están funcionando bien:
-señal marco longitud 22500us
-300us de anchura de pulso de la señal
-canal señal ancho 900-2100us
-8 canales
-señal cambio positivo
Código EasyVR
El código de ejemplo proporcionado por el fabricante es suficiente para la personalización.
Es útil encendido el LED del módulo EasyVR mientras escucha o enviando un pitido, por lo que es claro cuando el módulo está escuchando y terminada la escucha.
Aplicación
Estoy utilizando esta solución en mi rover. Como es conducido 4WD y tiene 2 servos de dirección que tenía que escribir un código para mezclar los canales para el acelerador y dirección.
El control es muy sensible, que el único problema parece ser la sensibilidad del micrófono para ruidos cercanos.
Lamentablemente, lo que es 100% en una habitación tranquila que no es tan buena en la zona abierta.
Posible solución será el uso de más o menos auriculares con micrófono de cancelación de ruido.
Video acerca de la prueba de la señal PPM es aquí: https://www.youtube.com/watch?v=wy--dcPDkxs
Movimiento de servo prueba aquí: https://www.youtube.com/watch?v=7wMpf1I6KZM
El video de la primera unidad de prueba es avaiilable aquí: http://www.youtube.com/watch?v=PdtaiYcidfs
Nota: los videos pueden contener idiomas (Húngaro)
Planes para el futuro
Por ahora, equipo FPV aún no está presente. Un sistema de 5.8GHz 200mW está previsto para ser utilizado con la cámara Gopro y RHCP CL antenas.
Va a ser el mismo sistema probado que estoy usando en mi multirotor recientemente.
El código se extenderá por control de 3 canales más, para la cabeza de la cacerola/la inclinación, donde se montará la cámara FPV, así como
el sistema de torreta que permite el disparo automático de balas del BB.
Actualización (20/07/2013)
Por fin encontre tiempo para terminar el proyecto (primer proyecto, por lo menos).
La pistola:
Alimentación y capacidad:
La D93 también ha sido modificado un poco y coloca boca abajo. La cámara para las balas del BB se ha invertido también.
Por ahora, se ha añadido un simple tubo para la alimentación de la cámara. La capacidad del tubo es de ~ 30 BBs.
Fuente de alimentación:
Primero probé el arma con 6V de un convertidor DC-DC de alimentación pero el índice del fuego era tan alto que provocó mal funcionamiento mientras se alimenta, así que decidí para 5V.
Mediante el uso de esta tensión, la alimentación es correcta y el tipo fuego es aún asequible.
El único problema fue que el cheapo chino CC corriente insuficiente para la pistola por lo que no podría trabajar.
Tuve que pedir otra, con rendimiento de 5A actual. Fue entregado días atrás y construidos sobre el vehículo.
Gatillo:
El disparador ha sido sacado y reemplazado por una electrónica de canal RC controlado. Se desencadena cuando el índice PWM de canal está sobre 50%.
El código de Arduino se ha modificado en consecuencia. Duración del fuego se ha fijado a 500ms.
El equipo de fpv:
Por ahora, el vehículo consiguió mi viejo transmisor de 5,8 G 200mW con una cámara de 5V de 520TVL muy ligero y pequeño. Prueba de banco solo se ha hecho hasta ahora.
Video rodado en el campo seguirá pronto.
TODOs:
Como el servo tilt sostiene todo el peso de la plataforma puede ser dañado fácilmente mientras rasing en el campo.
El arma será inicialmente en un puesto de estacionamiento y sólo cuando armados.
Para esto, es necesaria alguna modificación en el código de Arduino.
El fpv puede ser insuficiente, primeras pruebas de campo se mostrará ho mucho. Considere el uso de un engranaje de 900MHZ.
La prueba de banco de todas las funciones (incluida la leña del arma):
(ADVERTENCIA, comandos y descripción en lengua húngara-todavía)
http://www.youtube.com/watch?v=BtKFoPYSMZw



")



")





