Paso 9: Cómo los mandos funcionan
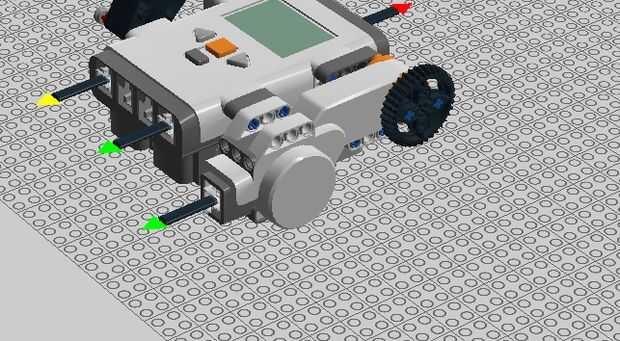

1 control remoto:
Se supone que mantenga el mando a distancia con el pulgar izquierdo de la palanca. Al pulsar la palanca hacia delante, empuja el sensor de contacto más cercana a usted. Este sensor, cuando se activa, mueve el robot remite y al revés ocurre cuando usted tira de la palanca hacia atrás. debido a las dos bandas de goma que están vinculadas a la palanca, siempre no volverá a la posición central (pulsar nada), importar qué manera que empuje la palanca.
__
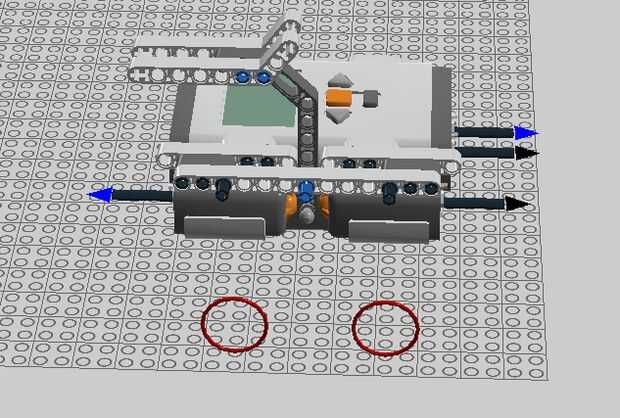
2 control remoto:
Hay tres partes de este control remoto: la esfera, el la palanca y el sensor de contacto de abajo. Voy a explicar lo que cada uno.
La esfera:
sólo gire remite a avanzar, mover más lejos para ir más rápido. Hay un número que aparecerá en su pantalla. Esto es sólo un indicador para mostrar que el dial está en. Usted tendrá que convertirlo a cero para hacerlo detener. Voltea hacia atrás para ir hacia atrás; La pantalla mostrará los números negativos.
La palanca:
Cuando presione en el panel más cercano a usted, que será presionar una palanca que se presiona un sensor táctil, que también hará que vaya (a toda velocidad). Esto es si no quiere lidiar con la rotación de la esfera.
El botón inferior:
Puede sostener el control remoto como usted generalmente y a esto Presione con la palma más bajada de su mano izquierda. Esto hará que el error de venir a una parada completa. Es muy útil si se utiliza el dial.







")





