











Frecuentemente, me han preguntado acerca de cómo construir algunos de mis proyectos de reutilización porque no es fácil encontrar cosas, como un ejemplo, perillas de horno (ésos son los pies del buen robot) o joysticks de Atari (yo usé dos unos dañados por "Rob Zombie" y los Fans del Atari casi sacrificaban me a Space Invaders por destruir patrimonio de la humanidad). Esa es la razón que siempre digo "Si no lo tienes, cámbielo!". Sustitución de materiales puede llegar nuevos diseños interesantes, algunos para mejor, algunos para mal.
Para demostrar esto, hecho al Walker, uno de mis favoritos de Randofo. Me encanta Simple Bots porque puede construir algunos robots bastante impresionantes sin ser un genio de la robótica (deseo que podría ser, algún día!). Pero tengo problemas con la mayoría de los materiales, así que tuve que hacer algunos reemplazos (original Walker es primero en letra negrilla):
- (x2) servos modificados para la impulsión directa: en Colombia, los servos son muy caros. Así que he usado cajas de cambio de un pequeño coche de juguete de R/C.
- microteléfono del teléfono de (x1): fijar las cajas de engranajes usando un ángulo de hierro. Hice una "cabeza" con un estuche de plástico de sensor de movimiento (que alberga al portapilas) con ojo rojo (tapas de plástico y un LED rojo). La cabeza se une al cuerpo gracias a una barra de plástico.
- (x1) 4 x soporte de pilas AA: no hay problema con esto, pero, gracias a la potencia de los cambios, hacerlo funciona con tres pilas. Así que tuve que hackear el portapilas para completar el circuito.
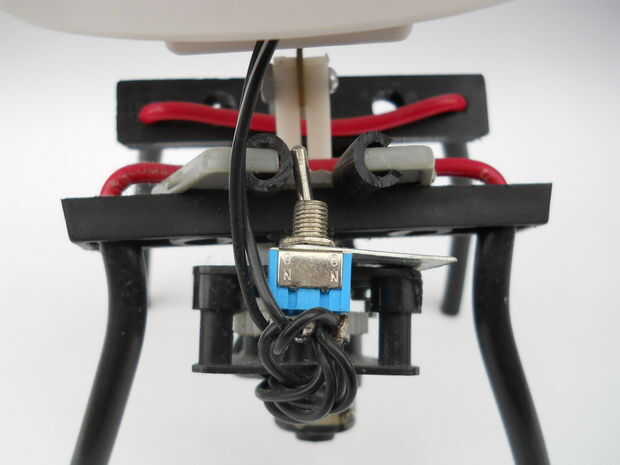
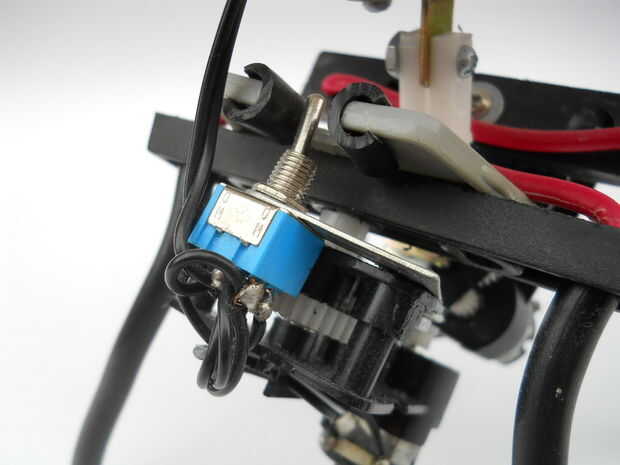
- (x1) interruptor de palanca DPDT: no hay problema con esto.
- (x2) CD: no me gusta trabajar con CDs, por lo que he usado barras de plástico color negro. Para el disco trasero (que se mueve el interruptor) usé un juguete de los transformadores del Pentágono de una caja de cereal.
- (x2) pernos de 6", 5" pernos de (x2), (x4) tornillos, perno cubre (x4): Quería probar un diseño flexible, usé alambre de cobre cubierto con mangueras de caucho negro.
- (x2) fina 1" tuerca y tornillo, (x1) un par docena surtido abrazaderas de plástico: He utilizado un montón de tuercas y tornillos. No trabajo tanto con ataduras de cremallera.
Como se puede ver, el diseño varía mucho y se ve totalmente diferente a la Walker de Randofo. Incluso el movimiento varía. Me encanta el ojo rojo porque se parece más a un robot malvado. Un ejército de zánganos mal tratando de apoderarse de la ciudad sería genial!
Mi próximo objetivo es, partiendo de este diseño, para construir Robot araña de una señora Cassandra (Doctor Who fans saben lo que estoy hablando)







 o Simple USB powered hack Walkie Talkie")





