


En esto nos hemos propuesto a un humanoide multipropósito sistema de que podría ser útil en muchos usos incluyendo defensa, vigilancia y cualquier entorno de trabajo peligroso. Para tener imitaciones exactas del cuerpo humano movimientos que hemos utilizado Artificial Neural Network (ANN), que es mucho mejor que convencionalmente usados puente H y clipper sistemas basados en considerar dicha solicitud. En este sistema hemos utilizado 4 acelerómetros y sensores para imitar movimientos gestos y cabeza de la mano humana por humanoide de la flexión. Técnica de mapeo de software lógica se emplea para realizar movimientos adecuados de humanoide con la ayuda de diferentes servomotores. El sistema humanoide es responsable para imitar movimientos de fino cuerpo humano sin ninguna conexión física de cable entre usuario y sistema humanoide.
En este proyecto proponemos una idea novedosa de combinar humanoide con teledirigido, con el fin de obtener ventaja de la precisión humana y tanque militar para conseguir la facilidad en el viaje por caminos ásperos y accidentados. Por lo tanto para utilizar una óptima capacidad de trabajo, funciona en dos modos diferentes: modo humanoide y la infiltración. Tal sistema óptimamente utilizado mientras se realiza la bomba desactivar trabajo, radiación atómica labs, laboratorio químico y en grado extremo como un soldado del futuro. Básicamente, cualquier situación donde la existencia humana es peligrosa aún requiere exactitud humana.
Dando robots de guerra 'autonomía' desata temor de máquinas de matar independientes similares a historias de ciencia ficción y películas. Por lo tanto estamos optimizando sistema controlado humano que proporciona un uso más suave y flexible de humanoide junto con el logro de resultados deseados. Mientras que el empleo de humanoide en condiciones extremas, el usuario lleva varios sensores en posiciones críticas de su cuerpo como las articulaciones que son ideales para el mapeo de la salida del sensor en los movimientos humanoides. Salidas de los sensores se proporcionan para microcontrolador para su posterior procesamiento. A través de comunicación inalámbrica el funcionamiento humanoide se realiza según el usuario.
A. modo de humanoide
Conjunto humanoide está desplegado para llevar a cabo tareas humanas que se asemejan a como recoger, sostener objetos y después de algunas mejoras cómo apuntar y disparar a través de armas militares modificados. Sistema puede ser dividido en dos partes bien diferenciadas:
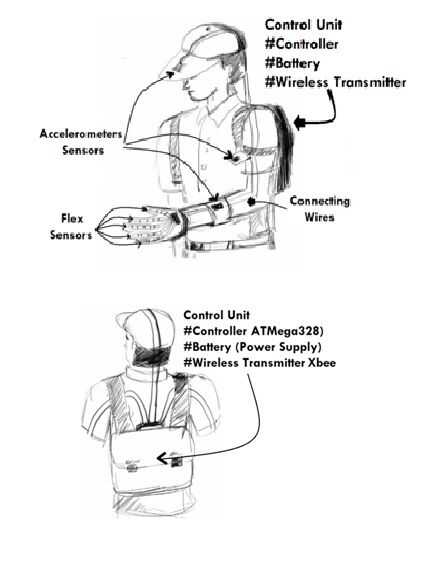
Lado del transmisor (Tx):
En nuestro sistema, para obtener el movimiento de la mano precisa, hemos utilizado 3 acelerómetros diferentes en tres posiciones críticas de la mano nada más que todas las juntas como se muestra en el diagrama.
Por lo tanto hemos colocado acelerómetro en hombro, codo y muñeca. Como los valores de las medidas de acelerómetros contra la gravedad, cuando se mueve la mano la salida del acelerómetro varía. Del mismo modo, para capturar el dedo movimientos que hemos utilizado flexión sensores que cambia su resistencia cuando los doblamos. Tanto los sensores utilizados son sensores analógicos medios proporciona la información de salida en forma analógica. Microcontrolador ATMega328 se encarga de convertir la señal analógica en digital ya que es obligatorio para el procesamiento de datos más. ATMega328 funciona junto con la placa Arduino Uno. Convierte señal analógica en digital en el rango de 0 a 1023. Procesado de la señal se transmite a través del módulo inalámbrico XBee que permite la transmisión de datos de alta velocidad. Como este es prototipo experimental, estamos utilizando el módulo XBee de la serie 1 básico. Realiza la modulación QPSK para realizar transmisión de datos eficiente con velocidad en baudios de 9600/s. Otras mejoras en la gama de comunicación XBee se describen en secciones más adelante.
Lado del receptor (Rx):
En el lado de Rx, estructura humanoide consta de varios servomotores para llevar a cabo la mano del hombre que se asemejan a los movimientos. Por lo tanto hemos montado servo en cada articulación del brazo. Además, existen 5 servomotores para cinco dedos.
Señal procesada del transmisor se recibe vía receptor de XBee. Aquí demodulación se realiza en Rx Xbee. Esta señal desmodulada todavía está en el formato digital y por lo tanto no podía ser reconocida por los servos presente. Ahora, estamos es necesario convertir la señal digital en señal comprensible servo. Servo entender la señal PWM en el ángulo de 0-180 grados. Receptor ATMega328 controlador con placa de Arduino Uno es responsable de la conversión de la señal y proporciona la señal PWM para servos para realizar tareas adecuadas.
Movimiento de la mano de usuarios y el movimiento humanoide a través de servo deben en sincronizarse entre sí. Este fue el desafío vital durante la asignación y programación. Como usuario del mano en ángulo específico debe coincidir con el ángulo de eje servo resultando en usuario imitando movimientos humanoides.
B. infiltración modo
En viajar distancias más largas, que podrían regular operación de aplicaciones que estamos buscando. Por lo tanto, es necesidad de diseño para adaptar la estructura física necesaria para obtener la facilidad de viajar. Por lo tanto, mientras que el sistema se está utilizando en el modo de infiltración, pliegues conjunto humanoide resultando en tanque militar como estructura. Ahora el usuario puede realizar eficientemente viajes larga distancia.
Para realizar la transformación en la actividad de la infiltración, utilizamos controlador base móvil de DTMF. Aquí se conectan dispositivos receptores de señal de red tales como teléfonos móviles lados emisor y receptor. Ya que utiliza tecnología móvil basada inherentemente tiene rango infinito. Significa que el drone puede accederse siempre que alcance de la señal móvil está disponible.










")


