Paso 5: Conexiones y diagramas de cableado
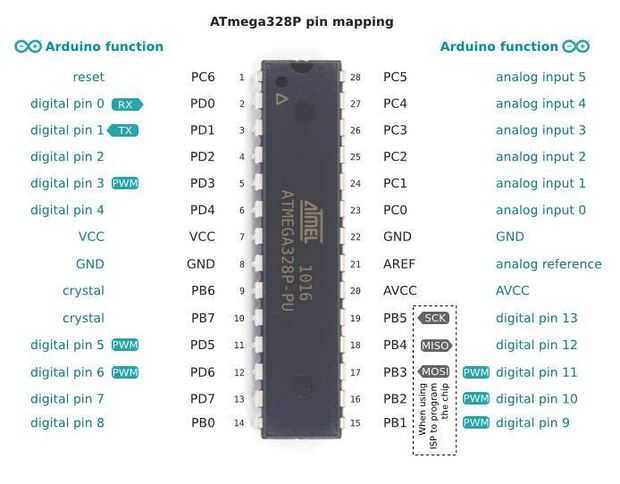
Hacer uso del diagrama de pines de Arduino y Atmega 328 referencia mientras se conectan los cables
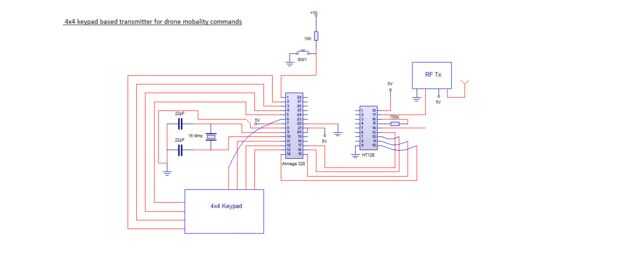
Diagrama del circuito de control de la movilidad en el lado transmisor
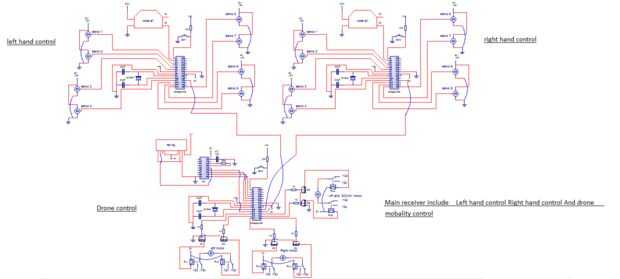
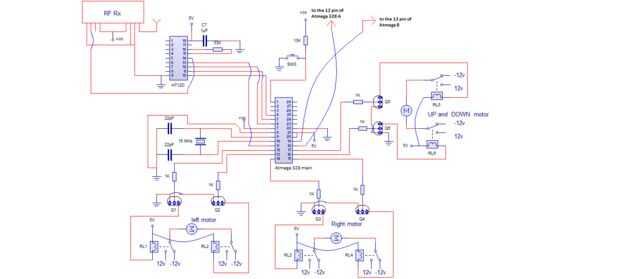
Diagrama del circuito de control de la movilidad en el lado del receptor
Descripción del circuito:
Los movimientos locomotores de humanoide son controlados directamente por teclado indicado en diagrama. Este teclado es responsable para la toma de entrada de movimientos del usuario tales como adelante, atrás, izquierda y derecha. Además, hemos incluido dos modos especiales para este humanoide tener facilidad de viajar, a saber, el modo de infiltración y humanoide.
Lado del transmisor:
Tan pronto como el usuario hace clic en uno de los botones del teclado por ejemplo adelante botón, el código de 8 bits se genera y envía al microcontrolador ATMega328 que lea este código. Este código recibido microcontrolador ATMega328 convierte en código de 4 bits para el procesamiento posterior. Código generado se da al codificador HT12E para convertir en datos en serie para la transmisión inalámbrica. Ahora datos serie de datos HT12E están aplicada RF módulo XBee. Antes de transmitir las señales de forma inalámbrica se realiza modulación amplitud Shift Keying (ASK). Se trata de cómo se transmiten los datos del lado del transmisor.
Lado del receptor:
Módulo de receptor RF XBee es responsable de recibir las señales inalámbricas, mientras que la señal se aplica a los datos del decodificador HT12D a través del pin de datos del XBee. HT12D decodificador convierte esto en datos en paralelo para obtener la señal original enviada. Para el procesamiento posterior, este datos en paralelo se dan al microcontrolador ATmega328. Genera un código de 4 bits para controlar servo motores para realizar izquierda, derecha, adelante o hacia atrás del movimiento.
Casos especiales:
Para cambiar el modo del sistema de infiltración al humanoide, el receptor microcontrolador ATMega328 patillas 18 y 19 va alta. Esto permite a otros dos microcontroladores del lado del receptor. En consecuencia, esto permite movimientos de la mano de humanoide. Mientras el robot levanta mediante mecanismo de cremallera y piñón para altura hasta deseado.
Por el contrario, si la transformación es de humanoide a la infiltración, el pin del microcontrolador ATMega328 del receptor 18 y pin 19 baja. Desactiva los dos microcontroladores del lado del receptor. Esta resultando en el bloqueo de lo servo motores en determinado ángulo a modo de infiltración.
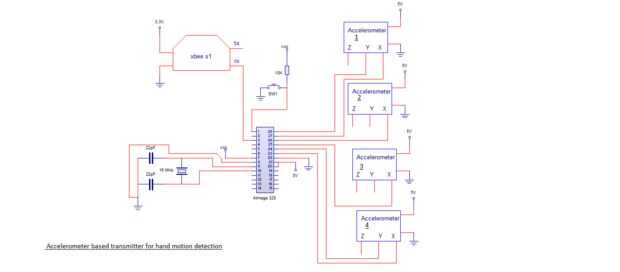
Detección del movimiento de la mano
Descripción del circuito:
Acelerómetros se utilizan para proporcionar información de la posición exacta de la mano del usuario. Hemos utilizado 4 acelerómetros para adquirir información de la posición del cuerpo del cuerpo humano. Da valores en z, x, y, sistema de 3 ejes coordinados. Como se puede ver en el diagrama del circuito, nos han tomado x y y información del acelerómetro presente en muñeca y la cabeza del usuario. Y para otros dos acelerómetros presentan en codo y el hombro sólo estamos tomando x la información.
Sin embargo el acelerómetro ofrece información en valores analógicos. Estos valores que tenemos que convertir en digital para su posterior procesamiento. Análogo a la conversión digital se realiza mediante el uso de microcontrolador ATMega328 es decir convierte continuo diferentes valores analógicos en valores digitales entre 0 y 1023. Además de esto, ATMega328 realiza la técnica de mapeo convirtiéndola en 100 a 230 para alcanzar el tamaño de paso de 1 grado. Asignados los valores se transmiten a través de módulo de RF XBee.
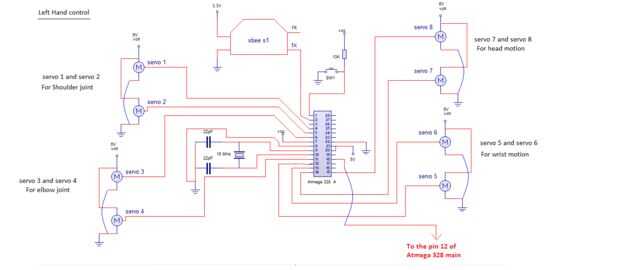
En el receptor, las señales recibidas se aplican al microcontrolador ATMega328 otra vez. Ya que el servo entiende valores entre 0-180 grados tenemos realizan mapeo nuevo para convertir esos valores en la banda de 0 a 180. Esta asignación se realiza mediante programación. Los valores asignados se aplican a los servos que son responsables de realizar movimientos del cuerpo humanoide.
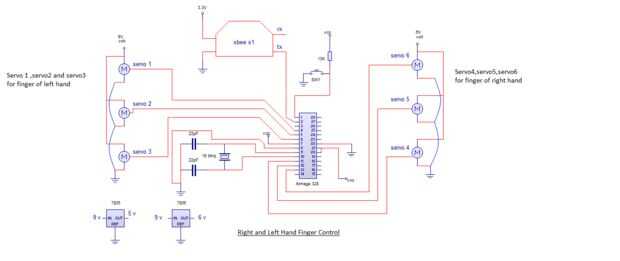
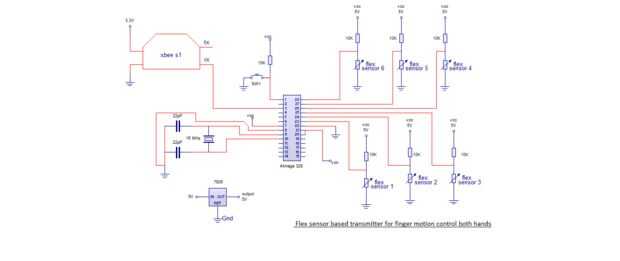
Transmisor control de dedo:
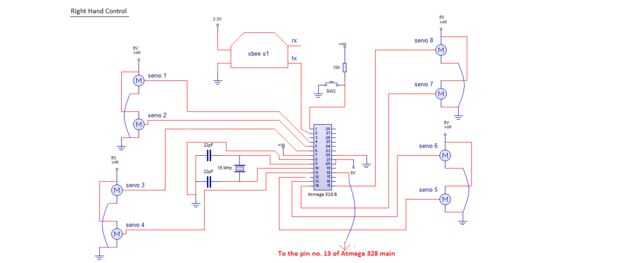
Receptor de control de dedo:
Descripción del circuito:
Para movimientos de dedos que hemos utilizado flex sensores que cambia su propia resistencia como doblan. Estos son sensores analógicos también. Como usuario mueve sus dedos, la flexión curvas sensores generando valores analógicos de salida. Estos valores que tenemos que convertir en digital para su posterior procesamiento. Análogo a la conversión digital se realiza mediante el uso de microcontrolador ATMega328 es decir convierte continuo diferentes valores analógicos en valores digitales entre 0 y 1023. Además de esto, ATMega328 realiza la técnica de mapeo convirtiéndola en 100 a 230 para alcanzar el tamaño de paso de 1 grado. Asignados los valores se transmiten a través de módulo de RF XBee.
En el receptor, las señales recibidas se aplican al microcontrolador ATMega328 otra vez. Ya que el servo entiende valores entre 0-180 grados tenemos realizan mapeo nuevo para convertir esos valores en la banda de 0 a 180. Esta asignación se realiza mediante programación. Los valores asignados se aplican a los servos que son responsables de realizar movimientos del cuerpo humanoide.










")


