Paso 6: Configurar grbl

El software es el lo único que queda ahora, así que vamos a empezar!
Vaya a este sitio web y descargar la última versión de grbl (grbl-master), este es el software que utilizamos para nuestro grabador del laser.
También necesita descargar la última versión de arduino IDE.
Cuando haya descargado grbl, busque el archivo config.h, en la carpeta llamada 'grbl' y reemplazar ese archivo con el archivo que subi aquí en algún lugar en este paso.
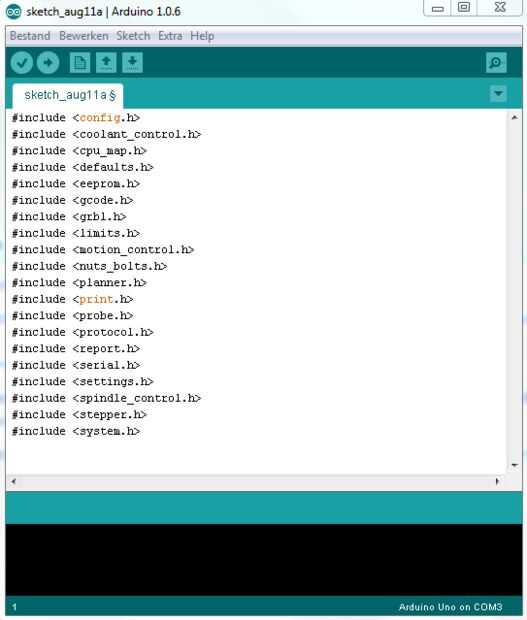
Cuando lo hayas hecho, abre el IDE de arduino y vaya a 'sketch' -> 'importar biblioteca' -> 'Añadir biblioteca' y seleccione la carpeta denominada grbl. Seleccione otra vez 'import library' y haga clic en 'grbl'. Ahora debe convertirse en algo así como la primera foto.
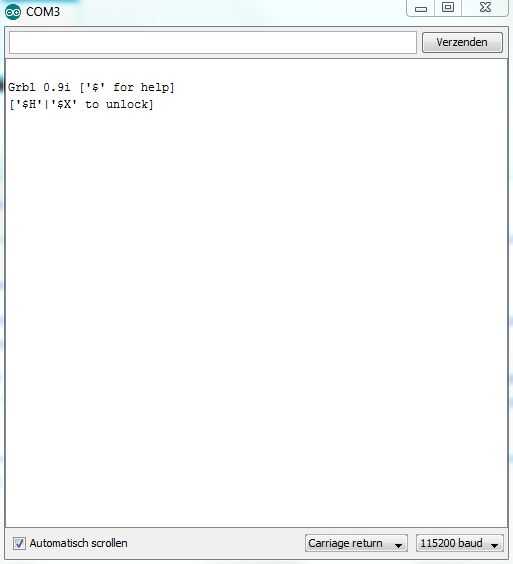
Ahora pulsa, mientras que en el arduino IDE, ctrl + Mayús + M. Este es el monitor de serie, la tasa de baudios (parte inferior derecha de la ventana) a 115200. Debería ver algo como la segunda imagen ahora.
Pulse '$$', golpe entra y verás algunos ajustes, cambiar a esto:
$0 = 10 (pulso de paso, usec)
$1 = 25 (paso demora inactivo, MS)
$2 = 0 (paso puerto invertir máscara: 00000000)
$3 = 0 (dir puerto invertir máscara: 00000000)
$4 = 0 (paso activar invert, bool)
$5 = 0 (límite pernos inversión, bool)
$6 = 0 (sonda pin invertido, bool)
$10 = 3 (estado informe máscara: 00000011)
$11 = 0.010 (desviación de la ensambladura, mm)
$12 = 0.002 (arco tolerancia, mm)
$13 = 0 (Informe pulgadas, bool)
$20 = 1 (límites blandos, bool)
$21 = 0 (límites duros, bool)
$22 = 1 (ciclo de recalada, bool)
$23 = 3 (homing dir invertir máscara: 00000011)
$24 = 50.000 (homing feed, mm/min)
$25 = 500.000 (buscan autoguiados hacia el blanco, m/min)
$26 = 244 (debounce autoguiados hacia el blanco, MS)
$27 = 3.000 (homing pull-off, mm)
$100 = 133.333 (x, paso/mm)
$101 = 133.333 (y, de paso/mm)
$102 = 250.000 (z, paso/mm)
$110 = 500.000 (x tarifa máxima, mm/min)
$111 = 500.000 (y tarifa máxima, mm/min)
$112 = 500.000 (tarifa máxima z, mm/min)
$120 dólares = 10.000 (x accel, m/seg ^ 2)
$121 = 10.000 (y aceleración, m/seg ^ 2)
$122 = 10.000 (accel z, m/seg ^ 2)
$130 = 500.000 (x max viaje, mm)
$131 = 400.000 (recorrido máximo y, mm)
$132 = 200.000 (recorrido máximo z, mm)
Y subirlo a tu arduino.








")



 servidores de madera grabado a láser")