Paso 5: Cableado de la placa del microcontrolador
Temas clave:
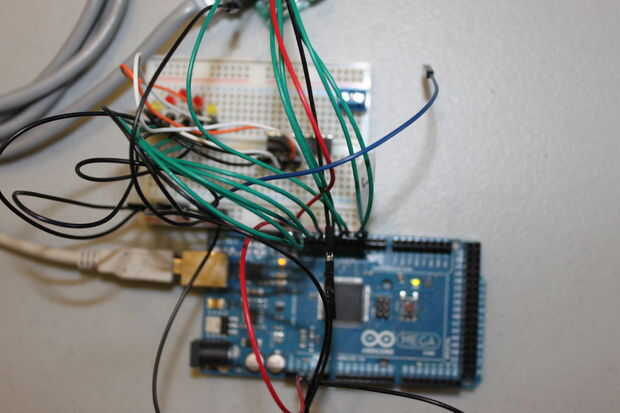
Selección del microcontrolador:
El Arduino Mega 2560 fue seleccionado debido a los pernos adicionales de PWM proporciona.
Por favor refiérase a arduino.cc para obtener mayor información sobre el HW, el entorno de desarrollo integrado (IDE)
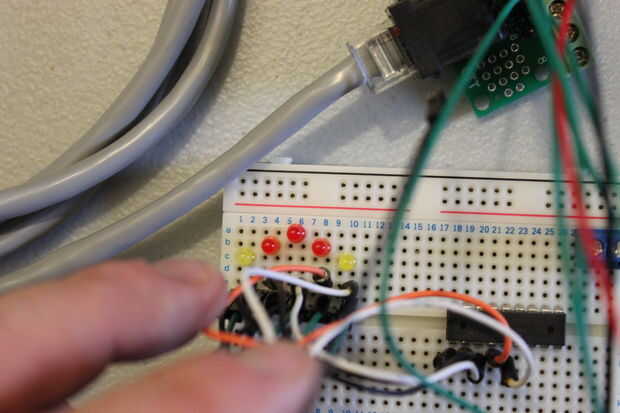
Entrada del sensor:
-5 de la modulación de ancho de pulso (PWM) pernos se utilizará para leer los valores de gama forman los sensores.
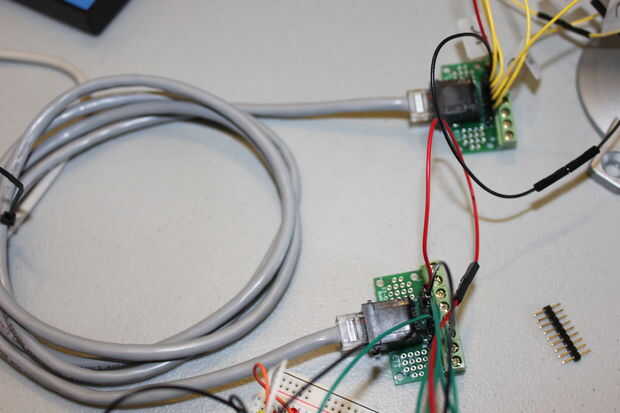
-Los pines de entrada vienen el término de RJ45 de Halo.
-3-7 se utilizan para este propósito
Salida del motor:
-5 de los pines PWM se utilizará para enviar pulsos al motor a través de la IC Darlington. Este IC conecta una carga a tierra cuando y entrada (estos 5 pernos) se afirmaron.
-Pin 12-Pin 8 se utilizan para este propósito
-Los pines de salida (su espejo todo el cuerpo de la IC) están conectados a las terminaciones de la partida de RJ45-término apagado a los motores de cinta para la cabeza
-La "primera parada" para estas salidas de los pines PWM es los LEDs utilizados en nuestra gama de depuración. Hace bastante blinky demos demasiado!
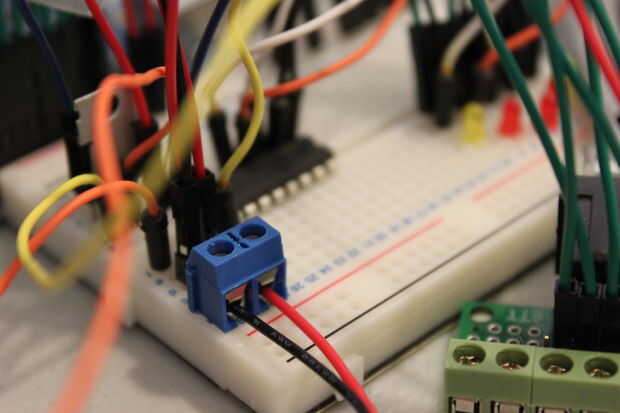
Subsistema de energía
-Una batería de 9v se utiliza para alimentar esta configuración por lo que no requre un enchufe de pared
-Los bornes de la batería de 9v se conectan a las entradas de Arduino Mega Vin y GND, así que esto proporciona alimentación al microcontrolador
-Un regulador de 5v se conecta a los terminales de 9v y este es enviado a unidad el IC Darlington (y a su vez, los motores) así que tenemos 2 sistemas de energía y el Arduino es aislado
-Un borne de tornillo de 2 puertos se utiliza para recibir los terminales de la batería













