Paso 4: transmisor
#include < MANCHESTER.h > //include la biblioteca para comunicarse
#define TxPin 2 //the pin que se utiliza para enviar datos
unsigned int Tdata = 0; comienzan los datos en 0
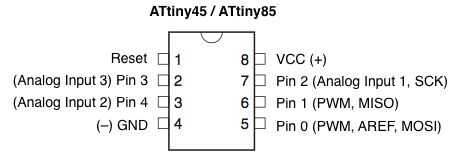
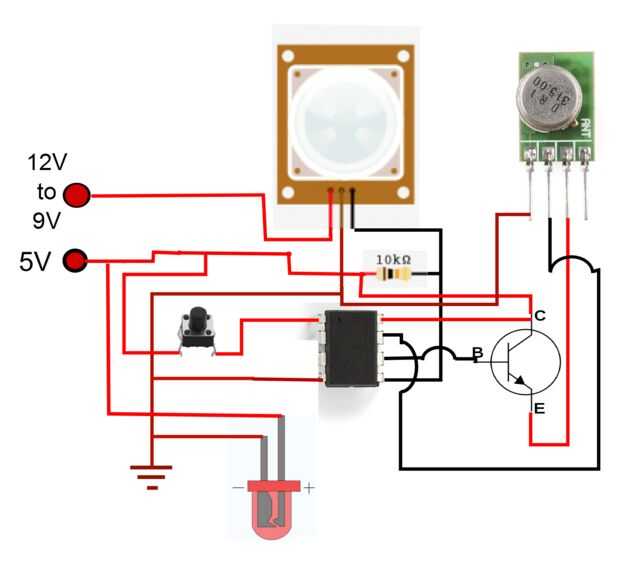
int TRANSISTOR_PIN = 1; PIN que encender y apagar el transistor
int PIR_SENSOR_PIN = 0; el conector de sensor de movimiento
void setup()
{
MANCHESTER. SetTxPin (TxPin); configurar el pin de la comunicación
pinMode (TRANSISTOR_PIN, salida);
pinMode (PIR_SENSOR_PIN, entrada);
}
void loop()
{
int pirVal=digitalRead(PIR_SENSOR_PIN); leer el estado del sensor de movimiento
if(pirVal == Low) //if pir sensor detecta movimiento después
{/ * acción, en este caso enciende el transistor de potencia
el emisor entonces enviar el mensaje,
el apagar el transistor * /
digitalWrite (TRANSISTOR_PIN, alto); //transistor en
Delay(1000);
TDATA = 50; Yo uso 50 como número de sensor1alarm pero se puede utilizar el número que desea
Asegúrese de que usted utilice el mismo número de transmisor y receptor
MANCHESTER. Transmit(TDATA); transmitir la señal de
Delay(100);
digitalWrite (TRANSISTOR_PIN, LOW); //turn transistor de apagado para ahorrar batería
}
Delay(2000);
}













