Paso 7: Construcción de la Frame(optional)



Hacer las piernas
Cortar dos piezas de una percha de alambre: las piernas de 28cm para las patas traseras y 25cm para el frente, como se muestra en. Doblar las piernas con unos alicates. Es importante que las piernas lo suficiente y para asegurarse de que los pies al revés, punto que les permite actuar como ganchos y permite al robot a subir encima de los obstáculos. En esta etapa, no te preocupes demasiado por la forma de las piernas. Puede ajustar más adelante (y probablemente va a necesitar).
Las piernas tendrán una mejor adherencia si cubre con la tubería de encogimiento de calor, como se muestra en. Tubería del encogimiento del calor es tubos de goma que se reducirá en diámetro en un 50% cuando se calienta, por ejemplo, con una pistola de calor o secador de pelo. Cortar dos piezas de 7cm de la tubería y reducir a alrededor de las patas traseras.
A continuación, Anexe las patas a los servos. Los servos vienen con uno o más accesorios de plástico que se conectan al eje del servo. Anexe las patas tirando alambres de metal a través de los orificios de servo y sujete cada pata apretando el alambre de metal, como se muestra en. Corte cualquier exceso de cable para evitar obstaculizar el movimiento del motor. Finalmente, agregue el pegamento caliente en la parte inferior para estabilizar las piernas, pero no llene el agujero del tornillo con el pegamento.
Montaje de la estructura
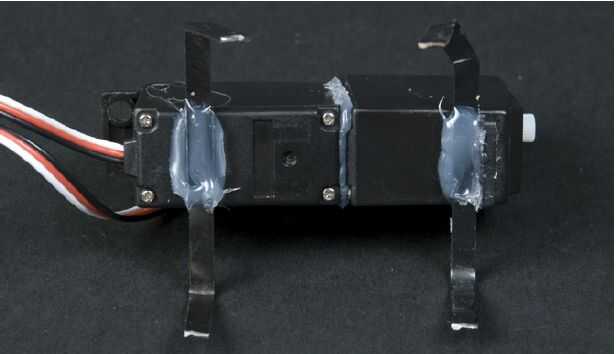
El marco de la andadera se compone de dos servos conectados. Antes de pegarlas les juntos, usted necesita quitar una pequeña extensión de plástico (significada para el montaje de los servos) tanto de los servos. Retire la extensión al lado del brazo del servo el servo de frente y quitar la parte opuesta del servo hacia atrás. Usted puede hacer esto fácilmente con un cuchillo, como se muestra en. Es una buena idea para alisar la costura de corte con una lima pequeña para asegurarse de que no queden los encolados desigual y débil.
Extender el pegamento caliente uniformemente en el servo del trasero e inmediatamente los servos, mantiene constante un rato para darle tiempo al pegamento para fijar. Los servos están conectados para que el servo frontfacing brazo puntos adelante y el brazo hacia atrás abajo. Los lados superiores de los motores se deben colocar uniformemente, para hacerlo más fácil conectar al Arduino. Si usted comete un error de pegar las piezas, es fácil de separar sin demasiada fuerza. (Pegado en caliente no es necesariamente ideal para la construcción de dispositivos robustos, pero es una manera rápida y fácil para conectar casi cualquier cosa, y funciona bien con prototipos simples).
Haciendo el soporte para Arduino
Vamos a utilizar dos tiras de metal para la construcción de un soporte en la parte superior del robot que hará fácil atar y soltar el Arduino. Cortar dos piezas de metal de 10cm. Doblar los lados de cada tira para que el espacio en el medio es igual a la anchura de la Arduino y pegar dos tiras a los servos.
Arduino Duemilanove (y modelos más últimos, tales como la ONU) utilizado en este proyecto son de 5,2 cm de ancho. Si el metal que se utiliza es lo suficientemente flexible, es útil doblar la esquina hacia adentro ligeramente. Esta manera, puede chasquido Arduino robusta y, cuando haya terminado, retire sin dolor para otros usos.
Conectar una batería
Usaremos cinta de Velcro para hacer un sistema de fijación en la parte trasera del robot para la batería de 9V. Corte una tira de 16cm de la cinta de Velcro y fije los extremos juntos. Hacer agujeros para dos tornillos en el centro de la cinta. Fije la cinta de Velcro con tornillos a la parte de extensión de servos en la parte trasera del robot.
Asamblea
Ahora puede colocar la placa de Arduino en la cima de los servos. Anexe las patas a los servos, pero no atornillarlas bien todavía. Te conectamos los servos entre sí y a la Arduino con los cables de puente. En primer lugar, conecte los cables de negro (GND) de los servos usando un cable de puente negro de un servo al otro y luego usar otro cable puente negro para conectar uno de los servos a un pin del Arduino GND. Que tendrás que usar un poco de fuerza para insertar dos cables en uno de los encabezados de conexión del servo. A continuación, conecte los cables de alimentación de una manera similar, primero de un servo a la otra y luego al pin de alimentación de 5V de Arduino. Los cables de puente uso blanco (el color real puede variar) para controlar cada servo y conecte un puente amarillo cable del servo posterior al Arduino pin 2 y desde el servo delantero a Arduino pin 3.
Antes, en la sección de "Centrar el Servo", ejecutó un dibujo al centro un único servo. Si ejecuta este código otra vez para centrar el servo, usted podrá colocar la pierna en la posición correcta. Pero ahora hay dos servos, así que vamos a modificar el código anterior centrado para activar ambos servos hacia el centro:
La única diferencia entre esto y el código anterior centrado es la adición
de dos servo objetos denominados frontServo y rearServo:
1. definir una instancia del objeto Servo para el servo posterior.
2. dentro de la instalación, conecte el rearServo a la clavija 3.
3. enviar pulsos a los dos de los motores, haciendo que gire hacia el centro.
//twoServosCenter.pde - Center two servos #include Servo frontServo; Servo rearServo; 1 void setup() { frontServo.attach(2); rearServo.attach(3); 2 frontServo.write(90); 3 rearServo.write(90); } void loop() { delay(100); }



")



 de control")





