Paso 2: programación...
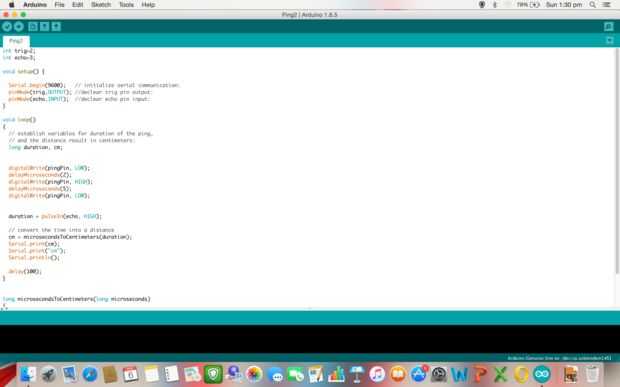
int trig = 2;
int eco = 3;
void setup() {}
Serial.Begin(9600); inicializar la comunicación serial:
pinMode(trig,OUTPUT); deClear salida polos trig:
pinMode(echo,INPUT); deClear echo pin entrada:}
void loop() {}
establecer las variables durante el ping,
y el resultado de la distancia en centímetros:
larga duración, cm;
digitalWrite (trig, LOW);
delayMicroseconds(2);
digitalWrite (trig, HIGH);
delayMicroseconds(5);
digitalWrite (trig, LOW);
duración = pulseIn (eco, alta);
convertir el tiempo en una distancia
cm = microsecondsToCentimeters(duration);
Serial.Print(cm);
Serial.Print("cm");
Serial.println();
Delay(100); }
largo microsecondsToCentimeters(long microseconds) {}
La velocidad del sonido es 340 m/s o 29 microsegundos por centímetro.
El ping viaja hacia fuera y hacia atrás, para encontrar la distancia de la
objeto que tomamos la mitad de la distancia recorrida.
volver microsegundos / 29 / 2; }



 con sensor ultrasónico de Arduino")




")




